
中 |

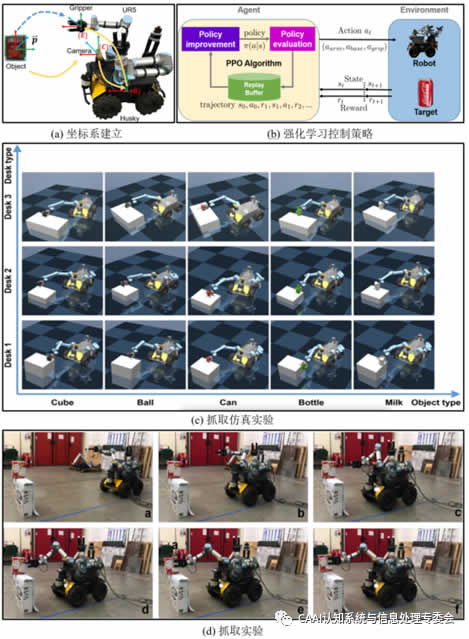
中科院沈阳自动化所的Wang利用深度强化学习算法和视觉感知相结合的方法来完成移动机器人(如图3(a))在非结构环境下的移动操作[7]。作者将移动操作过程看做一个标准的强化学习问题,先通过双目相机通过DOPE获取目标物体的6D姿态p以及机器人本体的当前状态st,接着通过基于PPO的强化学习算法预测机器人的本体,机械臂以及机械手的运动并控制机器人本体运动,后机器人的运动状态st+1和响应rt,其中响应主要包含了整个系统的控制响应rctrl、机械手末端的位置响应rdist以及抓取状态rgrasp(如图3(b))。后作者在仿真环境和真实环境下测试了不同G度下的抓取成功率,在仿真中,立方体的抓取效果好达到了90%的成功率,而球类物体较差仅有60%左右,而在实际测试过程中,在姿态估计正确的前提下可实现目标物体的成功抓取(如图3(c)(d))。
| 资料获取 | |
| 新闻资讯 | |
| == 资讯 == | |
| » 企业级智能体技术与应用研究报告2026- | |
| » AI 电子安全员「小铁匠」上岗雄安,天地 | |
| » 分布式机器人体系结构DIRA-利于机器人 | |
| » ALLIANCE机器人系统-用于不均匀多 | |
| » Nerd Herd机器人系统-避障、返回 | |
| » 多机器人系统的体系结构:集中式、 分层式 | |
| » 2026年全球前15名人形机器人-Tec | |
| » 基于具身大模型的多场景智能巡检机器人系统 | |
| » 中国具身智能市场规模预测分析 | |
| » 中国具身智能市场趋势量化预测:出货量翻几 | |
| » 中国具身智能区域产业集群:三大核心城市竞 | |
| » 2026年中国具身智能行业深度分析报告- | |
| » 2026年中国未来产业深度分析报告-机器 | |
| » 2026年全球及中国人形机器人关节模组市 | |
| » 基于世界模型的具身智能技术体系探索:破解 | |
| == 机器人推荐 == | |

服务机器人(迎宾、讲解、导诊...) |
|

智能消毒机器人 |
|

机器人底盘 |
 |
| 商用机器人 Disinfection Robot 展厅机器人 智能垃圾站 轮式机器人底盘 迎宾机器人 移动机器人底盘 讲解机器人 紫外线消毒机器人 大屏机器人 雾化消毒机器人 服务机器人底盘 智能送餐机器人 雾化消毒机 机器人OEM代工厂 消毒机器人排名 智能配送机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 导览机器人 酒店送物机器人 云迹科技润机器人 云迹酒店机器人 智能导诊机器人 |
