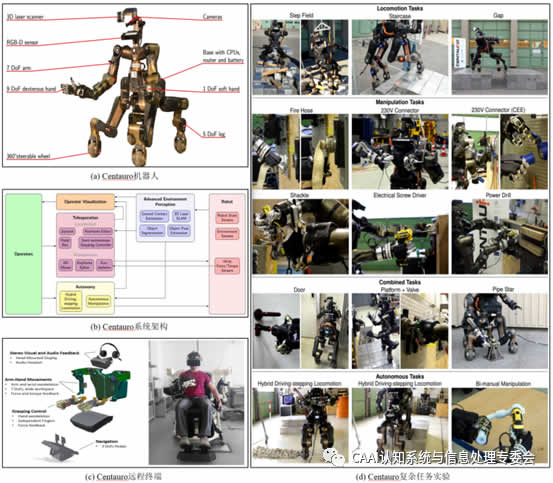
Centauro[11]是德国伯恩大学计算机学院研制的遥操作轮腿复合的移动操作机器人(如图5(a)(b))。Centauro整体采用与半人马相似的构型,头部配备一个3维激光雷达,实现对环境的三维建zhon图和感知;头部下端四周配置3个广角相机用于实时监控各部分的运动状态;颈部配备一台kinect相机用于对抓取目标物体的识别和姿态估计;肩部配备两个七自由度的机械臂和9自由度的机械手,可以完全模仿人体手臂的全部运动,机械手腕部配备扭力传感器和手部配备压力传感器,用于操作端的力反馈;行走机构由四个5自由的机械腿构成,可完成人体腿部运动的模仿,每个腿部具有独立驱动的主动轮,可实现平整路面快速移动和复杂路面的步态运动,腿部运动由基座的两个RGB相机实时监控;控制单元由三个PC构成,分别负责基础系统控制,视觉感知处理和G级功能控制(多传感器数据融合)。操作者可通过远程操作平台(如图5(c))实时操作Cantauro完成各种复杂操作任务,通过简单设置,Centauro通过融合自身携带的多传感器信息可实现自主移动和抓取操作。Tobias Klamt[12]测试了Centauro在多种操作任务中的系统稳定性(如图5(d))。
假肢腕设计的有效基准能够做3自由度运动,即旋前/旋后、屈伸和桡侧/尺侧偏移,未受影响的腕关节,其大活动范围通常在76度/85度
旋转器用于使终端设备沿前臂的纵向放出或滚动,而屈肌使终端设备弯曲或俯仰, OB棘轮式旋转手腕,被动腕部装置的锁定也可以通过使用不可反向驱动的机构来实现
2自由度腕部由一个与旋转器串联的屈肌单元组成,形成一个U型关节。其中一种设备是OBRoboWrist ,它可以同时锁住前旋和屈曲,当解锁时,还可以通过转动手腕上的项圈来调节运动产生摩擦阻力
3自由度人工手腕在某些方面优于人类的手腕,如运动范围或扭矩输出。尽管一些假肢在设计中加入了3自由度手腕,但串行3自由度手腕设备在机器人应用中更普遍
具有相同数量自由度的设备之间进行比较时,串行机构往往比并行机构更长,对于串行机构,运动范围和扭矩规格通常简单地由执行机构的选择和基本形状几何决定
假肢需要直接的人类互动来发挥功能,而机器人手腕则完全是主动的,假腕还包括外部可调节功能,如可调节摩擦或锁定;机器人手腕的任何调整通常都是在控制系统内完成的
由于软体材料的发展,灵巧手也开始柔软起来,如柏林工业大学研制的软体、欠驱动、柔性多指灵巧手、康奈尔大学研制的软体多指灵巧手、上海航空航天大学研制的软体多指灵巧手
环境感知技术:机器人感知环境及自身状态的窗口、运动控制技术:定位导航与运动协调控制、人机交互技术:人机有效沟通的桥梁
宋云峰博士分享了LDV激光测振及3D视觉传感技术在智能机器人中的应用,主要介绍了智能机器人光学感知技术、LDV激光测振及3D视觉传感技术原理及产品介绍、应用案例分享等内容
新型智能抓取机器人,结合深度学习方法,赋予机器人主动探索感知的能力,解决了Affordance Map缺陷,提G了机器人在复杂环境下的抓取成功率
新加坡国立大学(NUS)的研究人员利用英特尔的神经形态芯片Loihi,开发出了一种人造皮肤,使机器人能够以比人类感觉神经系统快1000倍的速度检测触觉
1G性能减速器;2G性能伺服驱动系统;3智能控制器;4智能一体化关节;5新型传感器;6智能末端执行器




