
| 摩登7机器人 |
| CHUANGZE ROBOT |
在实现机器人智能导航中,SLAM发挥了重要作用,可帮助机器人实现地图构建与即时定位,但仅有SLAM是还不够的,还需要加入路径规划和运动控制。在SLAM技术帮助机器人确定自身定位和构建地图之后,进行一个叫做目标点导航的能力。通俗的说,就是规划一条从A点到B点的路径出来,然后让机器人移动过去。
运动规划是一个很大的概念,从机械臂的运动、飞行器的飞行,到扫地机的清扫,机器人的移动,其实这些都是属于运动规划的范畴。
SLAM+路径规划和运动控制=机器人智能导航
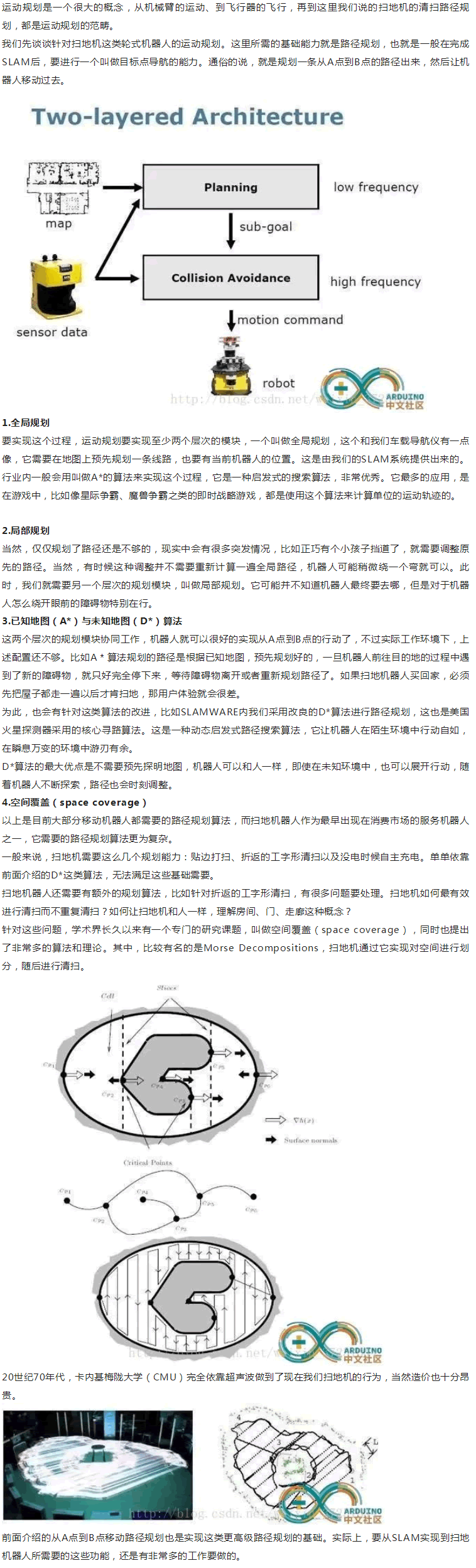
运动规划有全局路径规划和局部路径规划之分,全局路径规划是上层的运动规划逻辑,它按照机器人预先记录的环境地图并结合机器人当前位姿以及任务目标点的位置,在地图上找到前往目标点快捷的路径。
局部路径规划是指当环境出现变化或者上层规划的路径不利于机器人实际行走的时候(比如机器人在行走的过程中遇到障碍物),局部路径规划将做出微调。
与全局路径规划有所区别的是,局部路径规划可能并不知道机器人终要去哪,但是对于机器人怎么绕开眼前的障碍物特别在行。
这两个层次的规划模块协同工作,机器人就可以很好的实现从A点到B点的智能移动了。
实际上,SLAM算法本身只是完成了机器人的定位和地图构建两件事情,与摩登7说的导航定位并不是完全等价的。这里的导航,其实是SLAM算法做不了的。它在业内叫做运动规划(Motion Planning)。
 |
| 机器人招商 Disinfection Robot 机器人公司 机器人应用 智能医疗 物联网 机器人排名 机器人企业 机器人政策 教育机器人 迎宾机器人 机器人开发 独角兽 消毒机器人品牌 消毒机器人 合理用药 地图 |



