
| 摩登7机器人 |
| CHUANGZE ROBOT |
建立坐标系:如图 2.1所示,建立以机器人几何中心(AC与DB的交点)为原点的CENTER坐标系,机器人前向运动方向为x轴正方向(红色箭头),与之垂直向左为y轴正方向(绿色箭头),z轴垂直于纸面向外,满足右手定则。
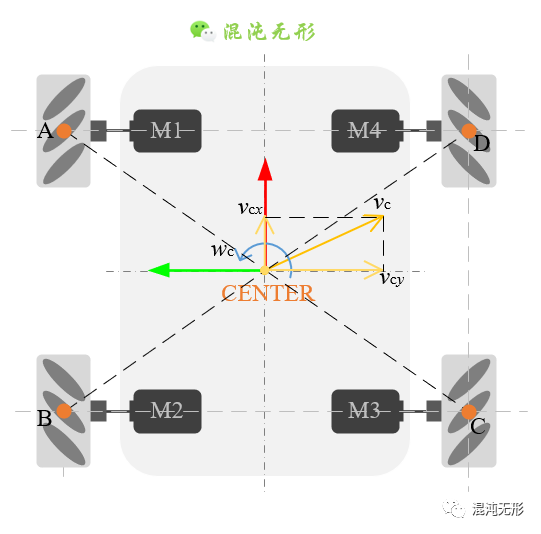
图 2.1 “内八”构型麦轮平台坐标系示意图
麦轮平台是全向移动机器人的原因是其有三个自由度,意味着可以在平面内做出任意方向平移同时自旋的动作,如图 2.1所示,采用任意方向的线速度及角速度[vc w]T来描述CENTER的速度,而vc可沿着坐标轴分解为两个分速度,表示为[vcx vcy w]T。
其线速度[vcx vcy]T方向为沿着坐标轴正方向则为正,反方向为负;而机器人逆时针旋转的时候,角速度w为正,反之为负。(定义方式与《两轮差速驱动机器人运动模型及应用分析》中的相似)
在对麦轮平台运动规律分析之前需要做两个基本假设:①麦轮平台运动过程中,轮子不会悬空而发生空转现象;②麦轮平台质量分布均匀,且质心位置在点CENTER处,以保证四个轮子在地面接触点受到的支撑力相同,确保四个等转速的轮子受到地面作用的摩擦力大小相同。
基于上述假设条件,并按照一定规律联合控制四个轮子等速转动,便可实现。这是因为轮毂轴与辊子转轴夹角呈45度,如图 1.2(c)所示,沿辊子轴线的静摩擦力可沿着轮毂轴向和径向分解,进一步迁移至图 1.4分析,只有当轮毂轴与辊子转轴夹角呈45度时,才能保证左右和前后对称位置的(等速)麦轮在轮毂轴向及径向上的分力可以恰好相互抵消,进而形成合力而运动。
要满足上述的分力能够相互抵消的条件是麦轮(或电机)转速大小相同,因为每个麦轮受到的地面支持力相同(基于假设①②),4个电机又匀速等速转动,意味着电机输出扭矩与地面作用于麦轮的摩擦力是平衡的,4个麦轮摩擦力在轮毂轴向和径向上分解的大小是相同的,而速度分解与力分解类似,所以4个麦轮沿轮毂轴向和径向的分速度大小是相同的。

 |
| 机器人招商 Disinfection Robot 机器人公司 机器人应用 智能医疗 物联网 机器人排名 机器人企业 机器人政策 教育机器人 迎宾机器人 机器人开发 独角兽 消毒机器人品牌 消毒机器人 合理用药 地图 |



