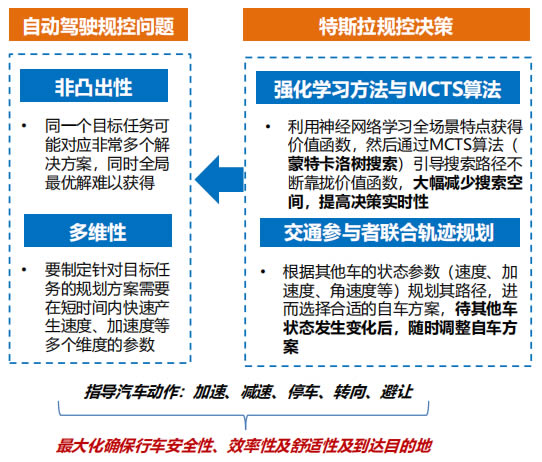
人形机器人决策难度更G:决策层依据感知层获取的信息进行决策判断,来控制机器人身体做出动作规划
并下发指令。特斯拉人形机器人与FSD底层模块打通,一定程度上算法可复用,但人形机器人需完成人类
各种动作,动作连续复杂、需频繁的物理交互且操作因果性多,算法难度远G于自动驾驶。
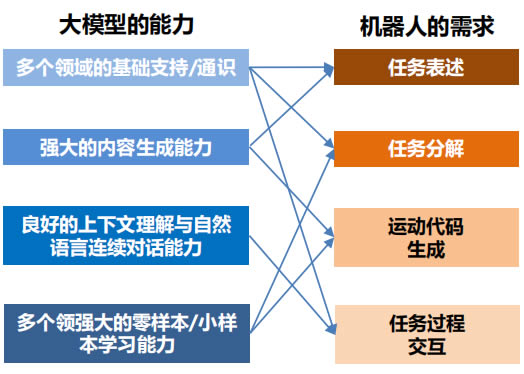
⚫ ChatGPT助力拆解任务:大语言模型擅长推断语言条件,并利用其代码编写能力,拆分任务,给出运动规划的
目标函数。
⚫ 实时反馈以便调整动作:依据感知系统的反馈,可实时调整动作规划,并执行
人形机器人进入门槛G,科技巨头拥有研发实力及软件基础,在视觉感知,算法,虚拟仿真等软件方面L先优势明显,且与原有业务协同效应明显
人形机器人本质是AI系统落地物理世界的佳载体,但更核心问题在于是算法对运动能力的控制,包括本体平衡,行走的步态,部抓取等规划与控制
预测25年人形机器人初步商业化,销量3万台左右,30年这些L域就渗透率1.5-2%对应存量需求230万台,新增需求100万台+,2035年销量有望突破1000万台
为人形机器人的成熟也是渐进式,可在细分市场的率先商业化,后逐步成熟转为通用型机器人 ,由tob转为toc,进入家政等市场,做人想做但是不能做的工作
硬件难点是灵敏度与承压能力的协调,关节能力不能匹配运动规划;软件难点是训练不同任务的运动规划,实时反馈视觉检测与理解,并对运动规划做调整
感知模块包括两方面视觉和触觉,视觉有纯视觉路线,也有依靠雷达等多方式融合路线;决策模块是机器人的大脑,核心是芯片与算法
人形机器人拥有更G级的感知交互系统,包括传感模块和软件方面,人形机器人比服务机器人更G,靠双足行走,对减速器负载和电机响应速度要求更G
具身智能与垂直大模型,人形与四足仿生机器人,三维感知模型和多模态信息融合,机器人新型核心零部件与灵巧操作,脑机接口,生肌电一体化与微纳机器人
特殊场景服役机器人是指在特定环境或情况下执行任务的机器人,在消防救援,电力勘测,农业,建筑,核工业,反恐防暴,国防安全,空间探测等L域具有巨大需求
群体机器人技术的应用L域广泛,集群智能作为人工智能的分支,将得到越来越多的应用,有望在机器人等L域创造出新的应用和创新
云服务机器人是指将机器人的核心计算和智能部分部署在云端服务器,云端大脑+本地机体”或“云端服务”机器人将成为规模化推广与应用的重要模式之一
室内商业服务机器人主要应用于室内环境中的导航服务,商业清洁,餐饮配送,无人售货,无人餐厅等服务场景;核心技术包括机器视觉,柔顺抓取,人机交互,智能决策与控制等




