
中 |

各行各业使用服务接待迎宾机器人已成为新的选择,各个媒体机构等也纷纷对接待机器人应用进行报道,没有疑问,在科学技术飞速发展的今天,智能机器人的广泛应用也顺应了时代的需求和百姓美好生活的向往。

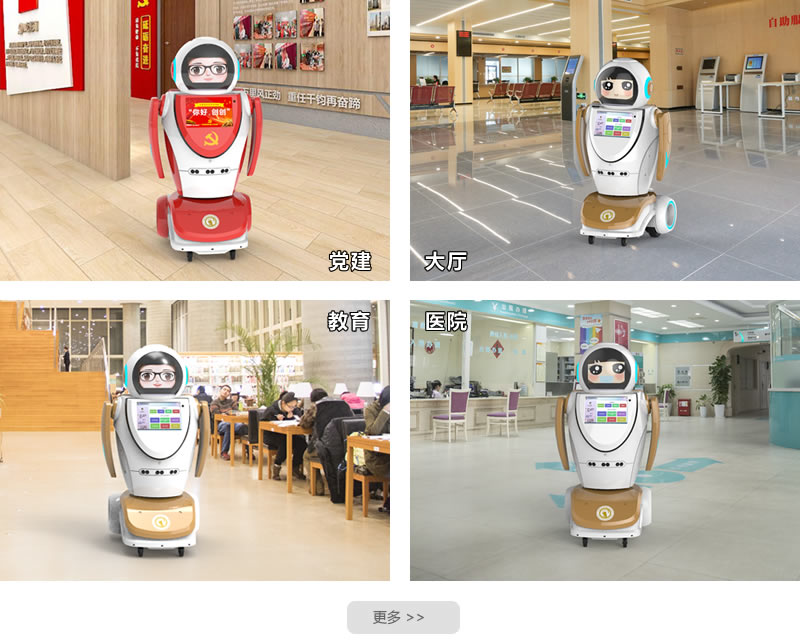
迎宾机器人因具有自主问候、语音交互、远程遥控、人脸识别等多项功能,所以一经推出,便成了机器人市场的焦点。在企业中,迎宾机器人可以智能接待,智能规划路线讲解,也可进行智能咨询。智能迎宾机器人能够提供智能接待、智能叫号、业务咨询、窗口引导等工作,帮助人民群众解决排队和咨询问题,亲切幽默与群众交流互动。
1 迎宾服务机器人CUCU

2 大屏服务机器人(迪伦)

3 双屏服务机器人(卡酷)

适用于商场、展览馆、会场、景区、银行、大厅、门位迎宾等可通过定制在不同的综合服务公共场
机器人集智能机器人行业的技术,并融合物联网、互联网、5G、大数据、云计算等技术集成系统的解决方案,以满足实际生活中各个场景下对智能服务的需求,能够全天候执行工作,并随时根据业务需求更新业务内容,他的自主学习能力还能够使机器人对话更加智能流畅,更好的服务于不同需求的场景。
销售1:4006-935-088 销售2:4006-937-088
价格:免费获取
查看更多相似文章 |
| 资料获取 | |
| 服务机器人在展馆迎宾讲解 |
|
| 浙江迎宾机器人 | |
| == 资讯 == | |
| » 摩登7迎宾机器人-27寸双屏商用迎宾机器人 | |
| » 讲解机器人部分案例 | |
| » 摩登7展厅机器人部署的原则 | |
| » 导览机器人部分案例 | |
| » 展厅迎宾机器人部分案例 | |
| » 银行接待机器人《小安》,科技赋能重构线下 | |
| » 迎宾讲解机器人如何选购?五大参考维度 | |
| » 展厅机器人智能控制系统设计方案:电源系统 | |
| » 迎宾前台机器人控制系统设计方案:电源系统 | |
| » 迎宾机器人外形结构设计方案:卡通形象,触 | |
| » AI迎宾接待机器人的技术壁垒之情感智能 | |
| » AI智能交互陪伴机器人核心技术:外观设计 | |
| » AI陪伴机器人-自然交互的陪伴机器人 | |
| » 新一代展厅指引服务机器人的机械手的特点: | |
| » 展厅迎宾机器人小脑技术的演进:视觉-语言 | |
| » 展厅迎宾讲解机器人的小脑技术路线:两种( | |
| » 迎宾服务机器人的大脑发展方向:智能化和自 | |
| » 智能迎宾服务机器人大模型多技术路线:四条 | |
| » 迎宾机器人的大脑需要具备的能力:实时交互 | |
| » 服务机器人的GPS-SLAM系统 | |
| == 机器人推荐 == | |

服务机器人(迎宾、讲解、导诊...) |
|

智能消毒机器人 |
|

机器人底盘 |
 |
| 商用机器人 Disinfection Robot 展厅机器人 智能垃圾站 轮式机器人底盘 迎宾机器人 移动机器人底盘 讲解机器人 紫外线消毒机器人 大屏机器人 雾化消毒机器人 服务机器人底盘 智能送餐机器人 雾化消毒机 机器人OEM代工厂 消毒机器人排名 智能配送机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 导览机器人 酒店送物机器人 云迹科技润机器人 云迹酒店机器人 智能导诊机器人 |
