
| 摩登7机器人 |
| CHUANGZE ROBOT |
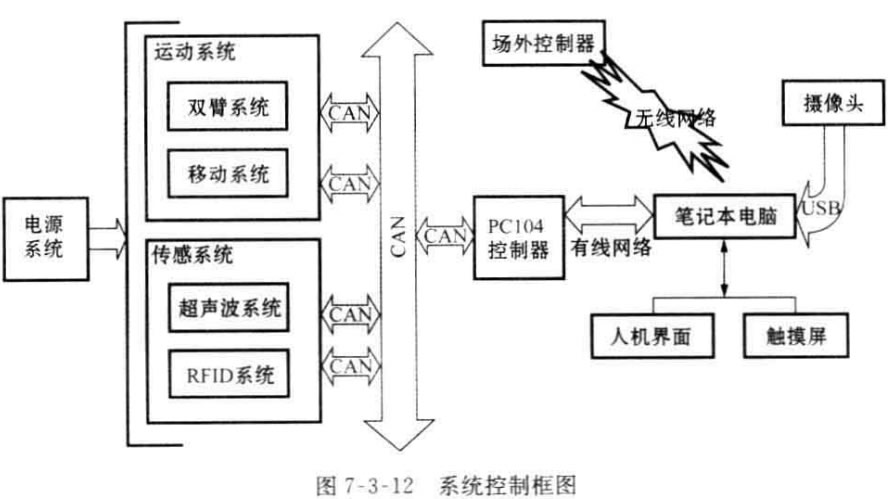
展厅机器人系统各硬件模块主要由CAN 总线连接,通过统一的CAN总线协议将各模块简单地加载到系统中。系统主要由电源系统、运动控制系统、传感系统等组成,其中运动控制系统包括双臂系统及移动系统,传感器系统包括超声波系统、RFID定位系统、视觉系统组成。具体结构由图7-3-12所示。
手臂各关节控制电路采用分布式控制系统,各关节控制器(主 MCU 是 TMS320LF2407)由CAN 总线相连(CAN2.0-A 版本)。控制周期为5m (即上位机 与 所 有 关 节 控 制 器 通 信 一 遍 , 再 加 一 定 裕 度 后 的 时 间 ) 。 各 关 节 控 制 电 路 结 构 如 图7 - 3 - 13、图7 - 3 - 14及图7 - 3 - 15所示。
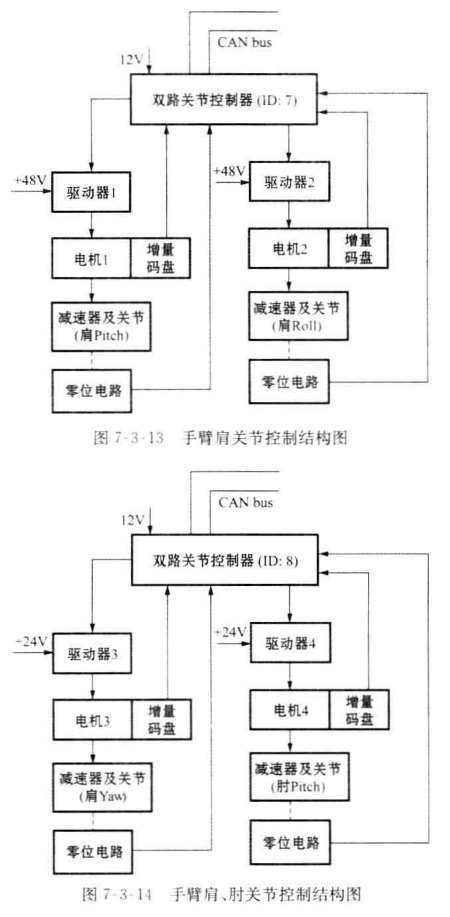
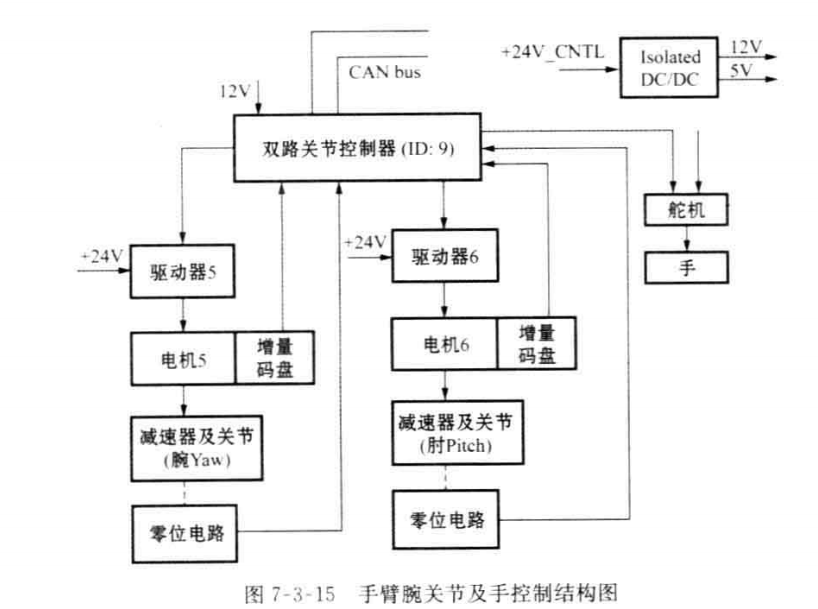
上位控制计算机采用PC 计算机,CAN 卡选用周立功的PC104CAN2 通信卡。 肩Pitch、肩 Roll、肩 Yaw、肘Pitch、腕 Yaw、腕Pitch 各关节的谐波减速器减速比分 别是100,100.100,100,100,100;电机码盘为增量码盘,线数为1000,1000,1000, 1000,1000,1000,直流有刷电机功率(RE 系列)分别为90W,90W.20W,60W,20W. 20W.
双臂机器人各运动部分均选用直流伺服电机,用于身体各个关节运动和底盘 移动的动力,根据双臂机器人的运动特点,可大致将直流伺服电机的运行方式分为 两 种 :
·底盘电机工作于速度控制模式。
·上身各个关节电机工作于位置控制模式。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |



