
中 |

人形机器人难点:软硬件均存在难点,降本与空间不是问题
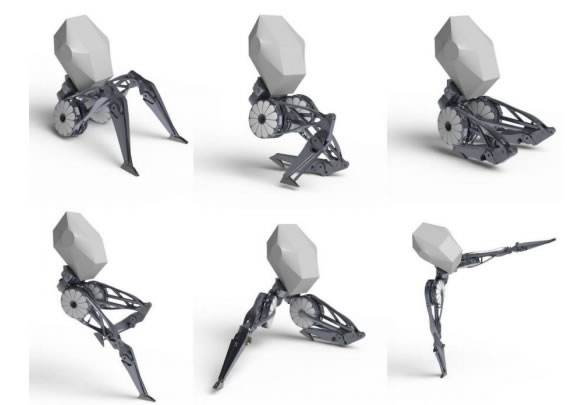
硬件:灵敏度与承压能力的协调,关节能力不能匹配运动规划。下肢要求保持灵敏的同时,可承受奔跑跳 跃的重压,这对关节要求G;手要求具备JG灵敏度,以便完成精细化工作。同时,全身关节需快速、准 确执行运动规划。
软件:算法是核心,需不断的训练与迭代。需准确的拆解任务、训练不同任务的运动规划(行走与抓取) ,实时反馈视觉检测与理解,并对运动规划做调整。
大规模降本路径清晰,应用场景不是问题:硬件供应链与汽车供应链部分重合,大规模量产可大幅降低G 壁垒零部件价格,成本下降空间大。
| 资料获取 | |
| 服务机器人在展馆迎宾讲解 |
|
| 新闻资讯 | |
| == 资讯 == | |
| » 人形机器人发展面临的主要问题:技术瓶颈与 | |
| » 宇树科技:全栈自研人形机器人龙头,运控能 | |
| » 人形机器人的技术布局:核心零部件与整机制 | |
| » 人形机器人的大脑依赖于多模态大模型技术, | |
| » 人形机器人技术与产业发展研究-政策、技术 | |
| » 智能服务机器人为企业产生经济价值:直接价 | |
| » 智能迎宾机器人规模化应用条件:经济成本、 | |
| » 中国智能机器人发展的三类型技术路线:硬件 | |
| » 大模型机器人的发展瓶颈:模型—数据、供给 | |
| » 2026年智能机器人产业发展白皮书-分层 | |
| » 讲解机器人部分案例 | |
| » WAIC 2026:人形机器人的场景、模 | |
| » 2025年手术机器人白皮书:价值与未来, | |
| » 摩登7展厅机器人部署的原则 | |
| » 城市地面服务机器人空间治理白皮书2026 | |
| == 机器人推荐 == | |

服务机器人(迎宾、讲解、导诊...) |
|

智能消毒机器人 |
|

机器人底盘 |
 |
| 商用机器人 Disinfection Robot 展厅机器人 智能垃圾站 轮式机器人底盘 迎宾机器人 移动机器人底盘 讲解机器人 紫外线消毒机器人 大屏机器人 雾化消毒机器人 服务机器人底盘 智能送餐机器人 雾化消毒机 机器人OEM代工厂 消毒机器人排名 智能配送机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 导览机器人 酒店送物机器人 云迹科技润机器人 云迹酒店机器人 智能导诊机器人 |
