
中 |

人形机器人安全是指机器人在设计运行环境及任务场景中,能够有效保障人 类生命财产、自身系统稳定以及周边环境安全的能力。其核心在于通过多维度防 护机制实现"全方位安全",即在硬件结构、软件算法、人机交互和环境适应等层 面构建预防性安全保障体系,从机械安全、电气安全、功能安全、协同安全等角 度出发,避免因系统故障、控制失效或环境干扰引发人身伤害、财产损失或社会 风险。
人形机器人安全具有高度集成性、任务多样性与人机共处环境复杂性等典型 特点,决定了其安全保障需要从底层结构到整体行为逐J展开、多层协同。人形 机器人安全不仅涉及单一部件的可靠性,还关联多个软硬件系统间的动态耦合与 协同控制。因此,人形机器人的安全基于“零件 — 部件 — 具身智能体 — 应 用场景”的检测路径进行全链路评估。
人形机器人危险是指人形机器人固有的潜在伤害来源,即其设计、功能或运 行中可能导致物理、心理或社会危害的固有属性。
所以针对人形机器人进行风险评估时,除依据 GB/T15706-2012(ISO 12100:2010)等标准外,还需利用全链致因过程模型的危害辨识方法,充分收集 考虑人形机器人风险触发条件和潜在危险场景,基于机械危险电气危险、热危险、 噪声危险、震动危险、辐射危险、材料/物质产生的危险、人类工效学危险、与 机器使用环境有关的危险、网络安全危险、远程升J危险、E/E/PE 控制领域的 危险、AI 应用安全领域的危险、伦理道德危险等典型危险类型进行分析。
人形机器人机械安全是指通过机械结构设计、材料选择、运动控制及物理防 护机制的综合优化,确保机器人在运行过程中避免因机械故障、运动失控或物理 接触导致人身伤害、设备损坏或环境破坏的能力。
人形机器人机械安全,一方面可以参照传统的机械安全要求针对棱缘和拐角 验证、配合间隙、限位装置、危险的运动部件防护等方面进行考虑,另一方面可 以针对人形机器人的运动特点补充静态稳定性以及动态稳定性的要求。
人形机器人电气安全是指通过电气系统设计、绝缘防护、能量管理及故障控 制等技术手段,确保机器人在运行、充电或维护过程中,避免因电气故障(如短 路、漏电、过载、电磁干扰等)引发触电、火灾、设备损毁或系统失效的能力。
人形机器人功能安全是指通过系统化的设计与控制策略,确保人形机器人在其功能执行过程中,即使因硬件故障、软件错误、环境干扰或人为误操作导致部 分功能失效时,仍能维持安全状态或执行预定义的安全响应,从而避免对人员、 环境或自身造成伤害。
人形机器人有别于服务机器人、工业机器人的工作场景工作任务局限,具备 多场景工作能力,故一方面人形机器人可以按照不同的工作场景进行风险评估并 提出特定的功能安全设计需求。
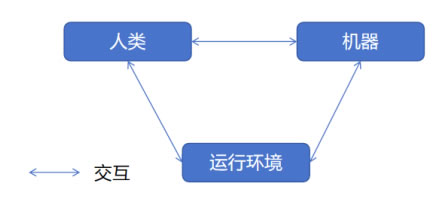
人形机器人协同安全是指在人类、机器人与运行环境三方主体之间建立持续感知、实时互联与动态应对机制,通过系统性风险防控与责任协作体系,实现风 险降低后的整体安全状态,主要考虑系统导向性、远程操作性、同步性及自主性。 该机制强调多主体联动、环境感知反馈与自适应调整,确保人形机器人在复杂应 用场景下的安全性、可靠性与韧性。
| 资料获取 | |
| 服务机器人在展馆迎宾讲解 |
|
| 新闻资讯 | |
| == 资讯 == | |
| » 机器人柔性关节的作用:自由度,防撞击、防 | |
| » 柔性机器人的研究目的:科学的目的,工程的 | |
| » 两轮机器人的运动原理:4个自由度:2个平 | |
| » 两轮机器人的基本构造:机体,底盘和轮系 | |
| » 机器龟的结构制作材料:底盘,执行器,传感 | |
| » 机器人的避障功能原理:接触式传感器触发的 | |
| » 4足机器人的制作材料:微型减速电机,车条 | |
| » 机器人CPG(中枢模式发生器)的制作材料 | |
| » 蚂蚁机器人的制作材料:74HC240,光 | |
| » 3D光电跟踪头的制作材料:74HC240 | |
| » 2D光电跟踪头的构造:两个光敏二极管, | |
| » 寻光机器人电子部分的制作材料:三极管,光 | |
| » 寻光机器人机械部分的制作:车式底盘,传感 | |
| » AI机器人赋能大物流数智化装卸应用场景- | |
| » 智能移动双臂机器人,多自由度双臂协同操作 | |
| == 机器人推荐 == | |

服务机器人(迎宾、讲解、导诊...) |
|
 |
| 消毒机器人排名 移动消毒机器人 导览机器人 |
