
中 |

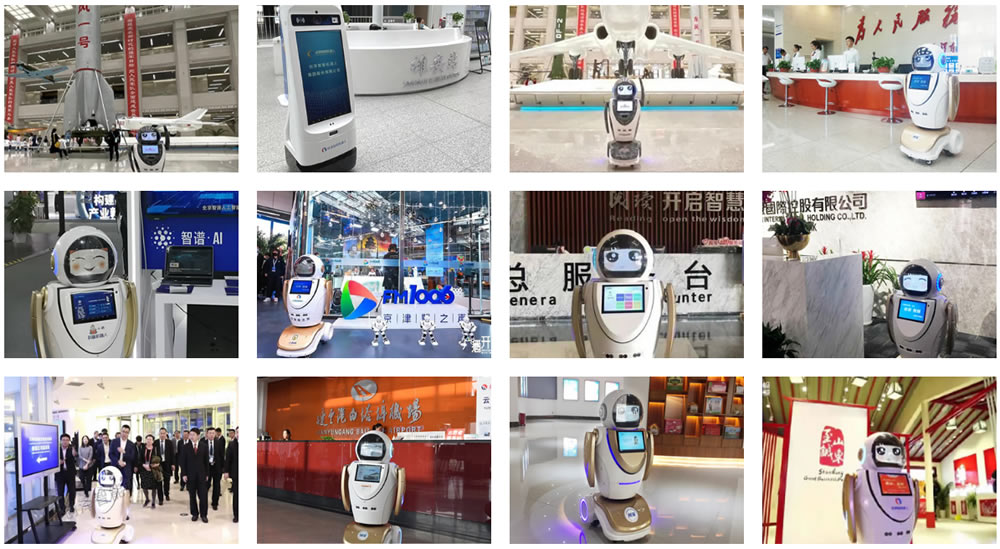
机场智能服务机器人在机场工作中

机场智能服务机器人目前已发展到第三代,凝聚了国内外D人工智能团队先进的科研成果,釆用拟人化设计, 是拥有视觉、触觉、听觉的个性化情感智能服务机器人,通过了机器人检 测与评定中心EMC和安全双资质认证,是国内早通过该双资质认证的四款 机器人之一,获PICC千万元质量承保,斩获了有“科技界诺贝尔奖”之称的CES 创新奖。
借助云端智能知识库平台,实现了在语义理解、知识学习推理与表示等方面完备的智能支撑体系。釆用先进的语 音引擎,搭载环形麦克风阵列,运用声控识别、人脸识别、情绪识别等技术为客户提供更加人性化的交互式服务。





售后:4008-128-728
地址:上海·科技园8号楼5层

机场智能服务机器人价格:***,可致电咨询。
查看更多相似文章 |
| 资料获取 | |
| 服务机器人在展馆迎宾讲解 |
|
| 更多 | |
| == 机器人推荐 == | |

服务机器人(迎宾、讲解、导诊...) |
|

智能消毒机器人 |
|

机器人底盘 |
 |
| 商用机器人 Disinfection Robot 展厅机器人 智能垃圾站 轮式机器人底盘 迎宾机器人 移动机器人底盘 讲解机器人 紫外线消毒机器人 大屏机器人 雾化消毒机器人 服务机器人底盘 智能送餐机器人 雾化消毒机 机器人OEM代工厂 消毒机器人排名 智能配送机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 导览机器人 酒店送物机器人 云迹科技润机器人 云迹酒店机器人 智能导诊机器人 |
