
| 摩登7机器人 |
| CHUANGZE ROBOT |
波士顿动力公司是世界知名的机器人公司,致力于研发具有灵活运动能力的多足机器人。波士顿动力1992年由Marc Raibert创立,脱胎于MIT和卡内基梅隆大学的“腿部实验室”。2005年,波士顿动力在美国国防G级研究计划局(DARPA) 的资助下开始开发四足机器人Big Dog,并在其支持下开发了一系列特种机器人原型。2013/2017/2020年,波士顿动力的控 制权先后易主Google、软银和现代汽车。目前,波士顿动力产品化销售的机器人主要包括四足机器狗Spot(用于工业巡检 等场景)和带机械臂的移动机器人Stretch(用于仓储自动化)。
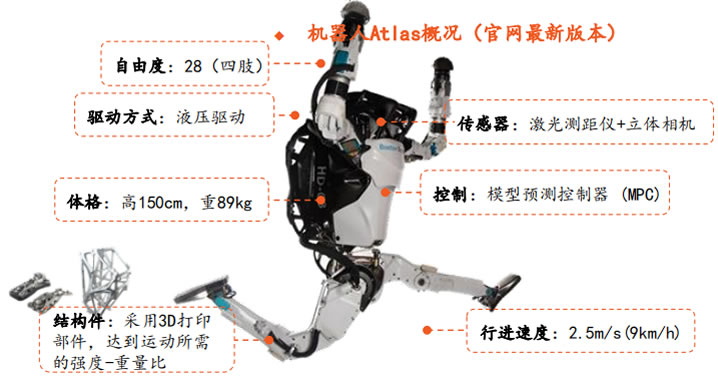
Atlas是波士顿动力旗下的人形机器人,目前仅用于科研,尚未产品化。Atlas亮相于2013年7月,初被设计用于搜救等任 务,其前身是公司2009年推出的双足机器人PETMAN。目前Atlas并未产品化,而是定位为波士顿动力内部的研究平台。
Atlas机动性优良,经过编程已经可以执行复杂的任务。DARPA机器人挑战赛中,不同团队对所使用的机器人进行编程,使 其完成包括进出车辆并驾驶、穿越地形复杂的灾后环境、开门和使用电动工具等一系列动作。2015年的决赛中,25支团 队有6支使用Atlas机器人参赛,其中IHMC ROBOTICS团队的Atlas用50分26秒完成了全部比赛任务,获得亚军。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 紫外线消毒机器人 消毒机器人价格 展厅机器人 服务机器人底盘 核酸采样机器人 机器人代工厂 智能配送机器人 喷雾消毒机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 消杀机器人 导览机器人 |


