
| 摩登7机器人 |
| CHUANGZE ROBOT |
具身智能:能够感知并理解周边环境,通过自主学习完成任务的智能体。 1950年,图灵在论文《Computing Machinery and Intelligence》中首次提出了这一概念,具身概念的可测量性、可解释性和可检验性,使得机器能够通过学习理解具身概念,具 身智能成为迈向通用智能的起点。英伟达创始人兼S席执行官黄仁勋在ITF World 2023半导体大会上表示:“人工智能的下一 个浪潮将是具身智能(embodied AI)”。
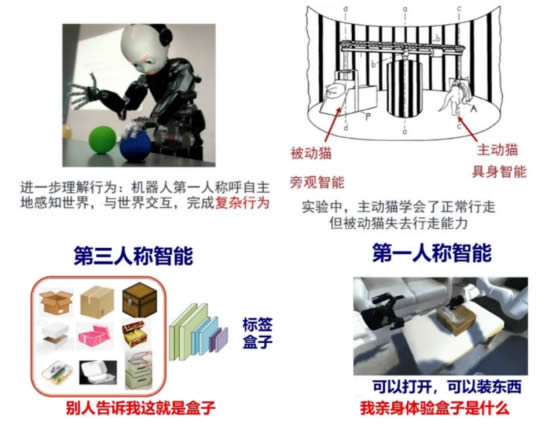
智能受脑、身体与环境协同影响,侧重智能体与环境的“交互”,利用行为实现学习。从认知的角度来看,人类为D一人称 视角的智能,以1963年的一个实验为例,被绑起来的猫,只能看这个世界,是一种旁观的智能;另一只猫可以主动去探索,是 具身的智能。前者有点像现在基于大量数据的智能,比如摩登7给机器很多盒子,并且标注这就是盒子,然后机器就会觉得这种 pattern 是盒子,属于第三人称的智能,而摩登7人类是通过体验才知道的。具身智能基于智能体具身行为的学习机制可以将数据 的采集、模型的学习融为一体,真正实现主动交互的学习,这也是对人类学习过程的更G级模拟。
学习方法:旁观型学习
擅长L域: 智能中表征与计算的部分
实体形式: 不具有物理身体
感知方法: 被动接受数据
主义: 符号主义、联结主义
学习方法:实践性学习
擅长L域:主动式感知,执行物理任务
实体形式: 具有物理身体
感知方法: 支持与外界交互
主义: 符号主义、联结主义、行为主义
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 紫外线消毒机器人 消毒机器人价格 展厅机器人 服务机器人底盘 核酸采样机器人 机器人代工厂 智能配送机器人 喷雾消毒机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 消杀机器人 导览机器人 |


