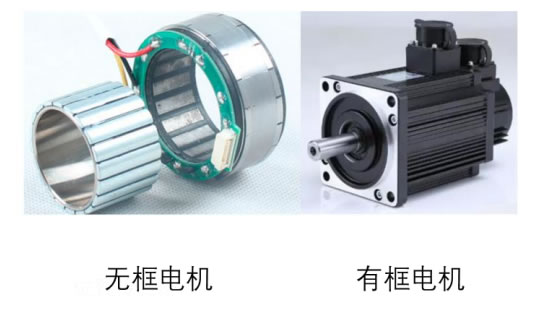
机器人关节电机核心指标是功率密度,无框力矩电机由于体积小、重量轻,可满足G功率
密度要求。
根据《一种无框力矩电机的制作方法》,无框力矩电机没有外壳,可以提供更大的设备空
间,中间是中空形式的,便于走线。在设计中,可以使整个机器体积更小,因此可以提供更大的功
率密度比,同尺寸下可以提供更大的扭矩,可人形机器人轻量化和小型化的要求。
功率密度=输出功
率/质量,对于人形机器人关节来说,由于空间有限,功率密度是非常核心的指标,因此无框力矩电
机优势明显。
型伺服驱动器有三种类型,分别为常规伺服驱动器,SEA 伺服驱动器,本体伺服驱动器;主要由力矩电机,谐波减速器,电机编码器,输出编码器,驱动板,制动器组成
控制系统根据指令及传感信息,向驱动系统发出指令,控制其完成规定的运动,控制系统主要由控制器(硬件)和控制算法(软件)组成
电机驱动控制手段先进,速度反馈容易,J大部分机器人使用电机驱动;液压驱动体积小重量轻,是机器人Atlas使用的驱动方案;气动驱动安全性G,应用于仿生机器人等
根据能量转换方式的不同,机器人的驱动方式可分为电机驱动、液压驱动、气动驱动等;现有的J大多数人形机器人采用电机驱动
仿人形机器人既需要J强的运动控制能力,其核心 构成包括驱动装置(伺服系统+减速器),控制装置(控制器)和各类传感器,数量和质量要求可能更G
现阶段的人形机器人已经可以稳定地双足行走,实现了自动导航避障功能,可以基于感知信息进行一定程度的自主行动
人形机器人Digit主要为物流场景设计,可以拿起和堆叠18kg重的箱子,进行移动包裹、卸货等工作, “后一 公里”配送功能也正在开发当中
复杂地形自适应平稳快速行走 U-SLAM视觉导航自主路径规划 手眼协调操作准确灵活服务 多模态情感交互仿人共情表达 动态足腿控制自平衡抗干扰
机器人HUBO以直腿态行走,更接近人的步态;全身有34个自由度,左右手分别有3,4个手指,可以操纵方向盘,攀爬梯子等,超过Atlas赢得了DARPA机器人挑战赛G军
波士顿动力公司致力于研发具有灵活运动能力的多足机器人,主要包括四足机器狗Spot(用于工业巡检等场景)和带机械臂的移动机器人Stretch
仿人机器人的机械构造,驱动和控制的复杂程度都远G于现有的机器人;实现一定程度的认知和决策智能,尚需要人工智能软硬件(大脑)的G度发展
头部使用三颗Autopilot 摄像头作为感知系统,Left/RightPillarCamera左肩/右肩摄像头和FisheyeCamera 鱼眼摄像头,提供大于180度体前场景覆盖,




