
| 摩登7机器人 |
| CHUANGZE ROBOT |
当前机器人行业的开发框架差异化显著 ,基于 封闭生态的机器人设计意味着机器人的软硬件 通常是固定且专用的 ,导致了兼容拓展性差、 维护迁移成本高等诸多问题。
模块化设计通过将机器人系统分解为多个软硬 件模块 ,厂商和用户可以根据不同的应用需求 进行灵活组合和定制。这一设计理念不仅提升 了产品的适应性和可扩展性 ,还为技术的创新 与产品的迭代提供了可能性 ,是开放性的全栈 式智能服务机器人生态系统的基石。服务机器 人模块化设计以多个软硬件模块——移动模 块、操作模块、交互模块、传感模块和数据处 理与通信模块为核心。通过这种灵活的设计, 服务机器人能够大大提升在不同场景中能够灵活应对复杂任务的能力。
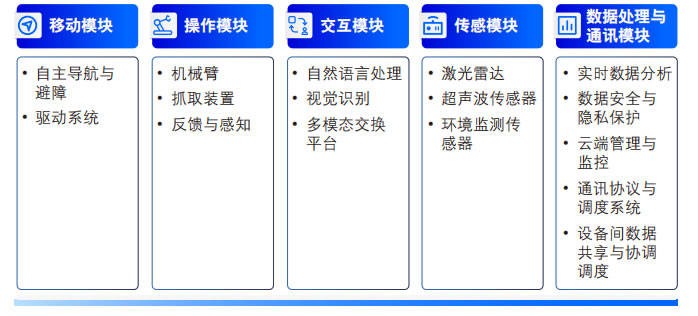
服务机器人的模块化设计主要包含以下要素:
1.移动模块
移动模块是服务机器人的基础部分 ,负责机器 人的机动性和导航 ,主要由底盘、驱动系统和 运动控制器组成。其主要功能包括:
• 自主导航与避障:硬件配置的激光雷达、传感器 和摄像头与运动控制系统的结合,使机器人能够 实时构建环境地图,进行路径规划和避障。
• 多种移动模式:服务机器人可以选择轮式、履 带式或足式等不同的移动方式,以适应不同的 环境和任务需求。例如,轮式底盘适合室内平 坦地面,足式对于复杂多变的地形的适应性则 更强。
2.操作模块
操作模块是实现具体任务操作的关键 ,包括机 械臂、抓取装置和执行器 ,并结合专用和通用 算法以提升机器人操作的灵活性与智能性。其 主要功能如下:
• 精细操作能力:机械臂通常配备多自由度的关 节 ,使其能够完成多样的动作 ,如抓取、搬 运、放置和清理等。结合通用算法,机器人能 够根据不同的操作对象和环境条件实时调整其 抓取策略与操作方式。
• 可选择工具配件 :操作模块可以根据应用需 要 ,轻松更换不同的工具和附件 ,如抓取夹 爪、灵巧手、吸盘或清洁刷,这不仅丰富了机 器人的功能,也增强了其通用性,能够适应不 同场景的需求。
• 复杂任务执行:操作模块集成通用算法,使机 器人能够根据环境变化智能地调整操作方式, 实现高效任务执行。例如,在餐饮服务中,机 器人可能需要同时进行食物配送、餐具清理 等,这些任务的执行依赖于通用算法的指导。
3.交互模块
交互模块是服务机器人与用户进行沟通的接 口 ,负责提供智能化的交互体验。其主要功能 包括:
• 多模态交互:借助自然语言处理(NLP)和计 算机视觉技术,服务机器人能够通过语音、手 势和图像与用户进行互动,提升交互的自然性 和亲和力。
• 情感分析与响应:结合AI算法,交互模块能够 分析用户的情感,调整服务机器人在互动中的 语气与内容,从而提供更具人性化和贴心的服 务体验。
4.传感模块
传感模块是赋予服务机器人环境感知能力的重要 部分,包含软硬件的综合应用。其功能包括:
• 环境监测:结合现代传感器(如激光雷达、超 声波传感器、红外传感器等)及实时处理软 件,机器人能够准确识别周围的物体及环境条 件,以支持智能决策与操作执行。
• 融合数据能力 :服务机器人通过数据处理算 法,能够集成来自不同传感器的信息,为决策 提供高质量的数据支持,确保其在复杂环境中 的操作能力。
5.数据处理与通信模块
数据处理与通信模块负责收集、分析和管理服 务机器人运行中的数据 ,相应的软件系统确保 数据安全与有效利用。其主要功能包括:
• 协同调度:通过设定开放的通信协议和高效的 数据共享机制,确保不同类型机器人间可以实 现多机器人协作的智能调度,优化任务的分配 和执行效率。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 核酸采样机器人 智能配送机器人 导览机器人 |


