
| 摩登7机器人 |
| CHUANGZE ROBOT |
1)设定位置和设定角度的检测
设定位置和设定角度的检测主要用于机器人运动关节的零位和极限位置的检测。零位是机器人关节运动开始时的位置,零位检测精度直接影响机器人运动的 准确度。极限位置是指机器人关节动作范围的起止点,所以极限位置的检测起着 保护机器人和安全动作的重要作用。
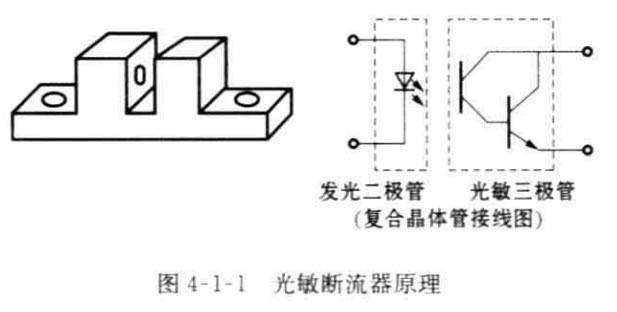
Z常用的位置传感器是微动行程开关,它由微型开关、操作机构(撞头或推杆) 组成。它安装在动作范围两端的极限位置上,当装在机器人运动部件上的挡块移 动到某一极限位置时,触动操作机构的撞头或推杆,使微型开关的触头闭合或断 开,即可获得位置的电信号。微动行程开关是一种既简单又可靠的检测传感器。 也可以用非接触型的光电开关作位置传感器,其工作原理与微动行程开关相同,区 别 在 于 它 是 利 用 光 敏 断 流 器 来 代 替 微 型 开 关 的 。 把 发 光 二 极 管 和 光 敏 三 极 管 在 相对方向中间隔开一段距离安装,当装有挡块的机器人 运动部件从中间穿过时,发光管的光线被隔断,从而使 光敏管感受到电信号,如图4-1-1所示。
除此之外还有很多其他原理的传感器,例如电感 式、电容式、磁电式、霍尔器件等也都能实现非接触的 接近开关,从而构成位置传感器。实际工作中可以从 价格成本、安装尺寸、测量精度、工作环境条件等各方 面因素来进行选择。
2)位移和角度的测量
位移传感器一般都安装在机器人的关节上,用来检测机器人各关节的位移量。作为机器人的位姿信息,它分为直线位移和转角位移两种, 一般直线移动关节用线位移传感器,旋转关 节转角用角位移传感器来测量。前者有直线电位计和容栅式位移传感器等,后者 有旋转电位计、旋转变压器、光电编码器等。 一般来说,角位移传感器比线位移传 感器的体积小,安装方便,所以也可以通过机械运动转换机构将所需测量的直线运 动位移变为旋转运动位移后,用角位移传感器进行测量。
从测量的方法看, 一种是模拟式,即将要测的位移量变换成模拟量(电流、电 压、电阻等)进行测量。这种检测所用元件的成本较低,使用条件不严格,像电位器 等;另一种是数字式,即将位移量变换成脉冲,每个脉冲与单位位移相对应,检测元 件输出脉冲数的数字量。这样易与计算机相连接,可存储、运算和控制,但制造安 装的精度较高。
旋转运动是除直线运动以外的Z主要的传动方式,因此用于测量角位移的传感 器在移动机器人学中也有Z广泛的应用。接下来介绍几种Z常用的角位移传感器。
(1)光学编码器:
光学编码器已经成为在电机驱动内部、轮轴、或在操纵机构上测量角速度和角 位移的Z普及的装置。在移动机器人学中,用编码器测量位置或轮子的速度,或其 他电机驱动的关节。因为这些传感器是本体感受式的,在机器人参考框架中,它们 的位置估计是Z佳的,而在用于机器人定位问题时,需要较大的校正。
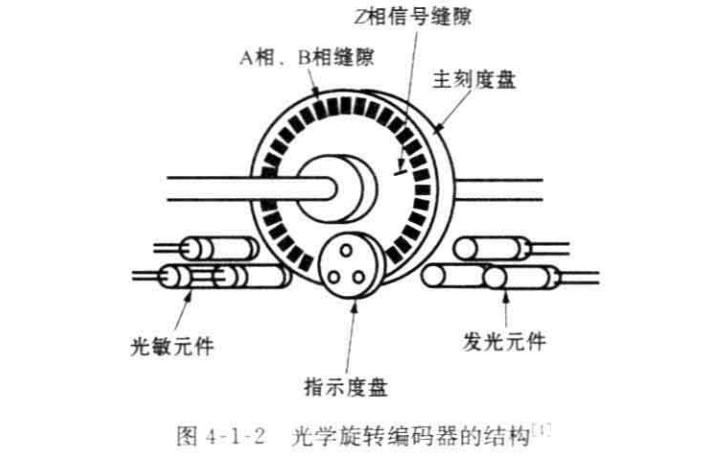
以图4-1-2为例说明光学编码器的结构。光学编码器由发光元件、屏蔽光的固 定光栅、与转轴一起旋转的带光栅的转盘和固定的光敏元件组成。发光元件和光敏 元件安放在码盘的两侧,当转盘转动时,根据固定的和运动的光栅的排列,光敏元件 接收的光通量会发生变化。光敏元件输出的波形经过整形后形成脉冲,根据脉冲计 数,可以得到固定在码盘上的转轴的角位移。在测量中,Z后得到的光强信号用阈 值变换成离散的方波,在亮和暗的状态之间作选择。分辨率以每转周期数(CPR)度量。Z小的角分辨率可以容易地从编码器的CPR 额定值计算出。典型的编码 器可拥有2000 CPR, 而光学编码器工业可容易地制造出具有10000 CPR 的 编 码 器。当然,根据所需的带宽,Z关键的是编码器需要足够快,以计算期望的轴转速。
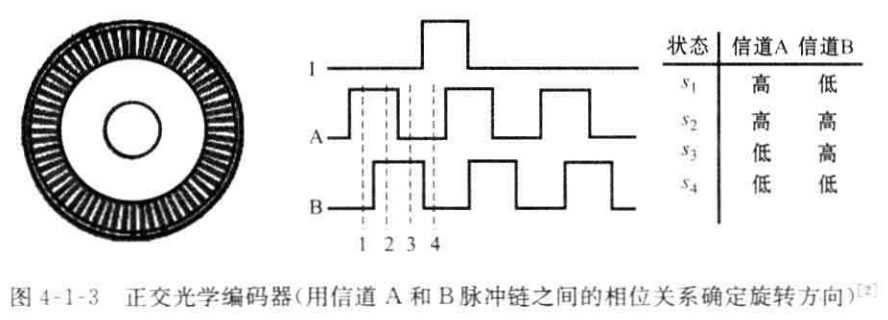
通常在需要分辨角位移和角速度的方向的时候,会使用正交编码器。在这种 情况下有两对照明源和检测器,第二对的照明源和检测器安装在距离D一对1/4 刻度周期的地方,如图4-1-3所示。两组光强信号合成的一对方波,提供了更多的 信息。按照哪个方波在相位上更超前,就可以确定转动方向。而且,四个可检测的 不同状态,在不改变转盘刻度的情况下,分辨率可提高4倍。因此, 一个2000CPR 正交编码器能产生8000个计数。
(2)磁式编码器:
光学编码器精度较高,工艺复杂,成本也比较高。作为移动轮角度的测量通常 并不需要这么高的精度,磁式编码器就是一种简单便宜的角位移传感器。
磁式传感器是利用霍尔效应的原理制成的。霍尔效应是指在一个半导体薄片 上有一电流通过,此时如有一磁场也作用于该半导体材料上,则在垂直于电流方向的半导体两端,会产生一个很小的电压,该电压就称为霍尔电压。当磁性材料制成 的转子旋转时,就会有一个变化的磁场作用于霍尔元件(半导体材料)上,使霍尔电 压产生脉冲信号。对所产生的脉冲数目计数即可检测角位移,其原理和光学编码 器是类似的。
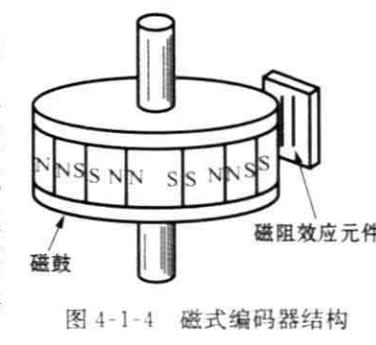
磁式编码器是通过在强磁性材料表面上等 间隔的磁化刻度标尺,标尺旁边相对放置磁阻 效应元件或霍尔元件,即能检测磁通的变化,如 图4-1-4所示,两个磁传感器的距离恰好是磁化 标尺间隔的1/4. 因此可以根据输出信号的相位 关系检测旋转方向。与光学编码器相比,磁式编 码器的刻度间隔大,但它具有耐油污、抗冲击等 特点。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


