
| 摩登7机器人 |
| CHUANGZE ROBOT |
典型的轮式移动机器人的机构,由车体、车轮、车轮-车体之间 将两者结合起来的支撑机构、车轮驱动机构等构成。
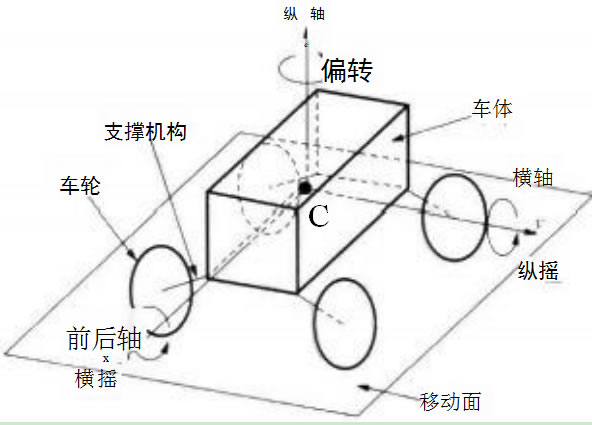
(1)车体:车体是车轮支撑机构的安装基座,在机械上起着决定各个车轮位置 关系的作用。另外,它在移动面与各车轮、车轮支撑部分之间起到驱动力和制动力 等的力传递作用。在实施移动时,多数情况下需要将车体上的某特定位置定义为基准点,车体有时也充当安装搭载机械手等的基座。
(2)车轮:车轮是轮式移动机器人的移动机构,车轮与车体实现机械耦合,共 同支撑车辆的质量,同时利用它相对于移动面的自由度,起到改变车体相对位置的 作用。车轮还能对移动带来的冲击产生缓冲作用,或利用自身的变形降低接触地 面的压强,或借助于轮胎面的图纹取得防滑效果。车轮的关键问题是如何选定材 料、表面形状和结构。
按照有无推进力功能,车轮可以分为驱动轮和从动轮两大类。根据单个车轮 的自由度,车轮可划分为一般车轮、球形轮、全方位轮等几类。车轮与移动地面之 间的接触区分为滑动接触、滚动接触两种。
如图2-1-2所示,机器人上所用的车轮可以分为四大类:D一大类是在轮式移 动机器人中得到广泛使用的常用车轮,如图2-1-2(a) 所示,其结构与摩登7常见的 车轮相同,称为标准轮,它有两个自由度,分别是围绕轮轴和接触点的转动;第二类 为小脚轮,如图2-1-2(b) 所示,它有三个自由度,围绕垂直轴的转动、围绕偏移的 轮轴和接触点的转动;第三类为瑞典轮,通常称为全方位车轮,如图2-1-2(c) 所示, 从该类车轮侧向视图可看出,其车轮外缘布置的辊子轴线与车轮轴线具有一定夹 角。这种车轮也有三个自由度,围绕轮轴、辊子和接触点的转动;第四类为球形轮, 如图2-1-2(d) 所示,这种车轮可以沿任何方向受动力而旋转,但在技术实现上比 其他轮子要困难一些。
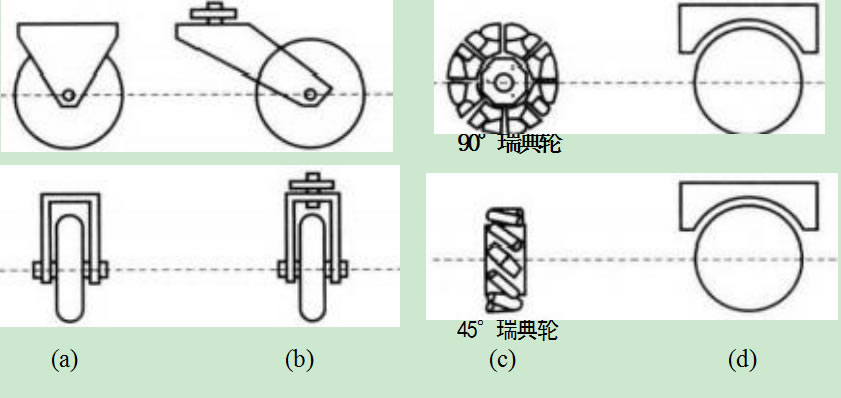
在这四种轮子中,标准轮和小脚轮有一个旋转主轴,因而在高度方向是有约束 的。在不同的运动方向,需要先沿着垂直轴操纵轮子。这两种轮子的主要差别 在于标准轮可以完成操纵而无副作用,因为旋转中心经过接触片着地,而小脚轮绕偏心轴旋转,在操纵期间会引起一个力,加到机器人的底盘。瑞典轮和球形轮的设 计比传统轮受力方向的约束少一些。瑞典轮的功能与标准轮一样,但它在另一方 向产生低的阻力,该方向有时垂直于常规方向,如瑞典轮90°;有时在中间角度,如 瑞典轮45°。装在轮子周围的辊子是被动的,轮的主轴是W一的与动力的连接。这 种设计的优点是:虽然轮子旋转仅通过主轴提供动力,但轮子以很小的摩擦,可以 沿许多可能的轨迹按照运动学原理移动,而不仅仅是向前或者向后移动。球形轮 是一种真正的全向轮,可以设计成沿任何方向受动力旋转。
(3)车轮支撑机构:车轮支撑机构位于车轮与车体之间,决定两者在空间上的 关系,包括自由度在内。车轮支撑机构承载车轮以上部分的载荷,并将它分解到各 个车轮上,悬挂装置、缓冲装置也应该包含在车轮支撑机构之内。
(4)驱动机构:Z常见的车轮驱动方式是用电机经过减速器后直接驱动车轮 的车轴。轮式移动机器人在多数场合中都是每个车轮有各自的驱动装置,分别进 行速度控制。实际上与移动面接触的车轮,即使它本身不直接被驱动旋转,也是能 够产生驱动力的,例如全方位车轮的移动机构。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


