
| 摩登7机器人 |
| CHUANGZE ROBOT |
随着足球机器人比赛的推广和足球机器人技术的发展,足球机器人的性能日 趋完善。在全自主足球机器人竞赛中,比赛规则对机器人的大小有严格的规定,比 赛中允许机器人之间合法冲撞,要求机器人具有很高的灵活性和很强的抗冲击性, 因此在比赛中,足球机器人移动是否准确、对抗时能否承受高强度冲击,这些问题 显得非常重要。针对以上问题,摩登7设计了一种驱动装置,该装置结构紧凑,调速 灵活,使机器人具有快速移动、定位准确、抗冲击、对抗性强的功能。该装置已经申 请了相关专利24。
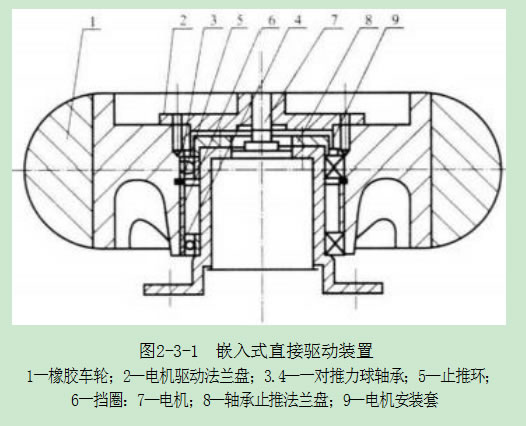
本驱动装置采用模块化双重嵌入式结构,整套装置由直流电机、橡胶车轮、 电机驱动法兰盘、一对防尘推力球轴承、止推环、挡圈、轴承止推法兰盘、电机安 装套构成。其中电机以螺钉连接,嵌入安装到电机安装套中,构成D一重嵌入式 结构;电机安装套通过推力球轴承、止推环和挡圈嵌入安装到橡胶车轮中,同时 起到车轮轴的作用;橡胶车轮中有配合面安装两只轴承,轴承与止推环和挡圈紧 贴,止推环安装到车轮的凹槽内,轴承分别由止推环、挡圈、橡胶车轮上的凸台、 轴承止推法兰盘和电机安装套上的凸台限定位置,轴承止推法兰盘通过螺钉与 电机安装套连接,电机驱动法兰盘用螺钉连接在橡胶车轮上,其中心有一键槽 孔,电机轴从电机安装套D部孔中伸出,与电机驱动法兰盘的中心键槽孔配合连 接,以上机构相互连接,共同嵌入安装到橡胶车轮中构成第二重嵌入式结构。整 套驱动装置成d立模块,通过电机安装套底部的法兰盘接口与机器人车体直接 连接。
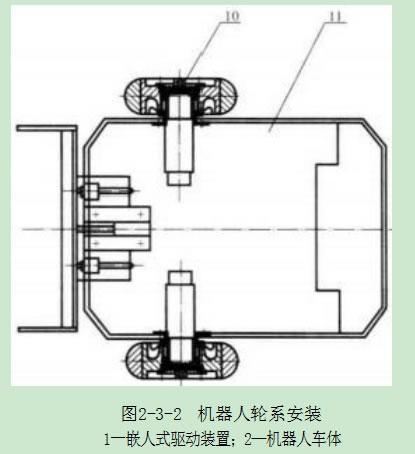
在该装置中选用带调速功能的直流电机作为动力,电机转动时由电机轴直接 带动,电机驱动法兰盘与车轮紧固连接,继而驱动车轮,实现直接驱动,车轮与电机 之间同步旋转,无任何变速环节和啮合环节,避免了累计回转误差和可能的打滑。 机器人车体上安装左右两个驱动装置,通过对电机转速的调节来控制车轮转速和 回转方向的变化,使机器人实现双轮差动运动,走直线、圆弧甚至更复杂的运动。 橡胶车轮与电机安装套间采用一对推力球轴承作为回转副,轴承与电机安装套。 外圈与橡胶车轮均为紧配合,两轴承间以止推环和挡圈保持间距,轴承与电机安装 套间通过轴承止推法兰盘和电机安装套的凸台限位,保证整体机构的稳定和配合的紧密。整套装置中,电机安装套、电机驱动法兰盘、轴承止推法兰盘以及相应连 接件推力球轴承、止推环、挡圈全部嵌入橡胶车轮中,配合紧密,同时起到车轮轴的 作用. 由于该结构短而粗,所以刚度强度相当大,能够承受很强的冲击。并且选用 的驱动电机嵌入电机安装套,机器人对抗时车轮承受的冲击由与车轮紧密配合的 电机安装套等部件直接承受,避免了电机直接承受冲击,起到缓冲作用。以上共同 构成双重嵌入式结构,结构精简、体积小,稳定性高和紧密度高。嵌入式直接驱动 装置如图2-3-1所示,机器人轮系安装如图2-3-2所示。
相对传统驱动方案而言,该装置具有显著优点,包括:
· 电机直接驱动,同步输出,无中间减少传动环节或啮合环节,避免了皮带传 动的打滑误差或者传统齿轮传动中的累计转角误差,定位准确。
· 无相对摩擦,减少不必要的磨损和功率损失。
· 嵌入式结构使电机和连接结构嵌入车轮,体积缩小、同样的体积上可以选 择功率更大的电机,使用此装置的机器人速度快、力量大、对抗性强。
· 嵌入轮内的短柱状结构代替传统的细长轮轴,无需联轴器,同时保护了电机,抗冲击性好。
· 轮轴缩短,刚度提高,无相对摩擦,延长了轮轴寿命。
· 该装置采取模块化设计,各元件连接好后成d立模块,接上机器人车体即 实现驱动功能,移植性很强。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


