
| 摩登7机器人 |
| CHUANGZE ROBOT |
HUBO是韩国科学技术院(KAIST)研发的人形机器人。韩国科学技术院(KAIST)是一所韩国大学,科学、工程与技术教 育L先。HUBO是KAIST旗下人形机器人研究中心 HUBO Lab研发的机器人,诞生于2004年,由教授Jun-Ho Oh主持开发。
2012年,HUBO Lab团队发布了用于出售的HUBO 2。不同于同期大部分人形机器人屈膝行走的姿势,HUBO 2能够以直腿 态行走,更接近人的步态,这是一个非常大的进步。截至2013年7月,已有12台HUBO 2出口到美国、中国和新加坡的 大学、研究机构和公司,用于机器人技术研究。
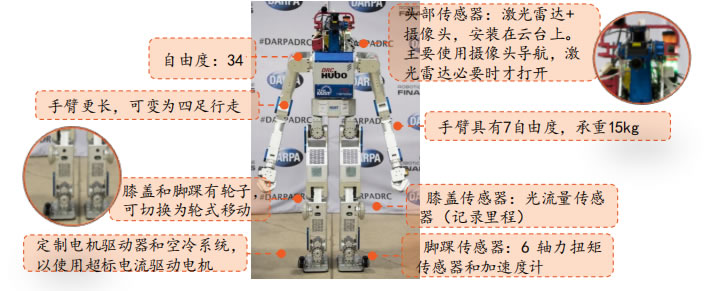
2013年7月,HUBO Lab团队宣布推出新型号HUBO,称为DRC-HUBO,专为参与DARPA机器人挑战赛(DARPA Robotics Challenge ,DRC)设计。它拥有更长的手臂和腿,可以在双足、四足行走和轮式前进之间切换;全身有34个自由度,左、 右手分别有3、4个手指,可以操纵方向盘、攀爬梯子等。2015年,DRC-HUBO超过Atlas赢得了DARPA机器人挑战赛G军。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 紫外线消毒机器人 消毒机器人价格 展厅机器人 服务机器人底盘 核酸采样机器人 机器人代工厂 智能配送机器人 喷雾消毒机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 消杀机器人 导览机器人 |


