
中 |

速度传感器用来检测机器人运动速度,包括身体移动速度和各关节转动速度 等。在用交直流伺服电机作为机器人驱动元件时,早期一般采用测速发电机作为 速度的检测器。它与电动机同轴,电动机转速不同时,输出的电压值也不同,其电 压值就是转动速度。测速发电机要求输出电压与转速间保持线性关系,并要求输 出电压陡度大,时间及温度稳定性好。测速发电机一般可分为直流式和交流式两种。直流式测速机的励磁方式可分为他励式和永磁式两种,电枢结构有带槽的、空心的、盘式印刷电路等形式,其中带槽式Z为常用。
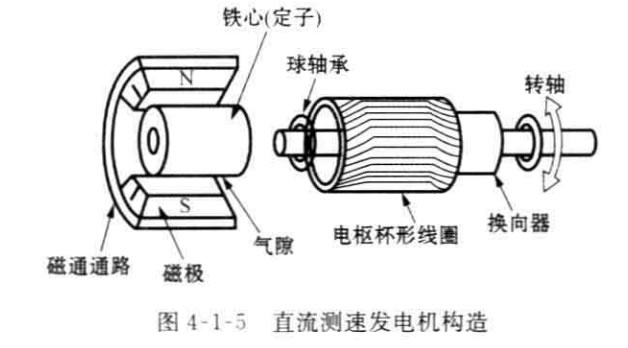
如图4-1-5所示,直流测速发电机的定子是永久磁铁,转子是线圈绕组。它的 原理和永久磁铁的直流发电机相同,转子产生的电压通过换向器和电刷以直流电 压的形式输出,可以测量0~10000r/min 量J的旋转速度,线性度为0 . 1 % 。 此 外,停机时不易产生残留电压,因此,它Z适宜作速度传感器。但是电刷部分是机械接触,需要注意维修,另外,换向器在切换时产生脉动电压,使测量精度降低。因 此,现在亦有用无刷直流测速发电机。
永久磁铁式交流测速发电机的构造和直流测速发电机恰好相反,它在转子上 安装多磁极永久磁铁,定子线圈输出与旋转速度成正比的交流电压。随着计算机 微电子技术的进步,现在一般不再专门使用测速发电机来测量转速,而是通过对位 移进行微分计算来获得速度值。如利用光电码盘测量角位移时,在单位时间内的 脉冲数即为速度。
| 资料获取 | |
| 新闻资讯 | |
| == 资讯 == | |
| » 四足机器人场景应用发展蓝皮书-市场约70 | |
| » 迎宾机器人的位置传感器:电位器、光电编码 | |
| » 人形机器人上岗餐饮酒店服务场景(如迎宾、 | |
| » 智能清洁机器人在商业综合体清洁场景,。模 | |
| » 中国人工智能系列白皮书—-具身智能(20 | |
| » 腰部外骨骼机器人,20kg的攀登与行走助 | |
| » 室内安防巡检机器人的数据中心巡检场景:多 | |
| » 光伏机器人清洁太阳能板的七大优点:独有性 | |
| » 2025上海智能机器人百大场景案例集-重 | |
| » 具身大模型:人形机器人智慧内核,主流框架 | |
| » 具身智能数据行业研究白皮书2026-数据 | |
| » 2025上海市“AI+制造”发展白皮书, | |
| » Hermes橙皮书《Hermes Age | |
| » 清华大学《OpenClaw在企业办公中的 | |
| » 基于多机器人协作的关键问题:有限带宽和地 | |
| == 机器人推荐 == | |

服务机器人(迎宾、讲解、导诊...) |
|

智能消毒机器人 |
|

机器人底盘 |
 |
| 商用机器人 Disinfection Robot 展厅机器人 智能垃圾站 轮式机器人底盘 迎宾机器人 移动机器人底盘 讲解机器人 紫外线消毒机器人 大屏机器人 雾化消毒机器人 服务机器人底盘 智能送餐机器人 雾化消毒机 机器人OEM代工厂 消毒机器人排名 智能配送机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 导览机器人 酒店送物机器人 云迹科技润机器人 云迹酒店机器人 智能导诊机器人 |
