
| 摩登7机器人 |
| CHUANGZE ROBOT |
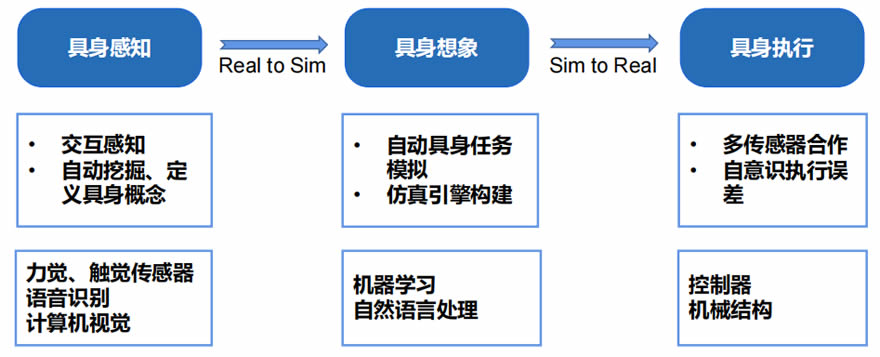
具身智能包含具身感知、具身想象和具身执行三个模块,涉及机器人学、计算机视觉、认 知科学、博弈学等诸多学科,各学科相对成熟的积累为具身智能进一步发展提供基础。2023年5月,上海市发布的《上海市促进 通用人工智能创新发展的若干措施(2023-2025 年)(征求意见稿)》中提出探索具身智能、通用智能体和类脑智能等通用人工 智能新路径,包括推动具身智能系统研究及应用,政策支持加速具身智能技术突破。
1 具身感知(Perception):通过视觉、触觉等传感器交互感知,构建模型,定义、获取、表达可以被机器人使用的具身概念。
2 具身想象(Imagination):构建仿真引擎,模拟具身任务,为机器人具身执行提供支撑。
3 具身执行(Execution):基于计算机视觉、机器人学和计算机图形学,通过多模型训练,在多传感器合作下完成任务执行。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 紫外线消毒机器人 消毒机器人价格 展厅机器人 服务机器人底盘 核酸采样机器人 机器人代工厂 智能配送机器人 喷雾消毒机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 消杀机器人 导览机器人 |


