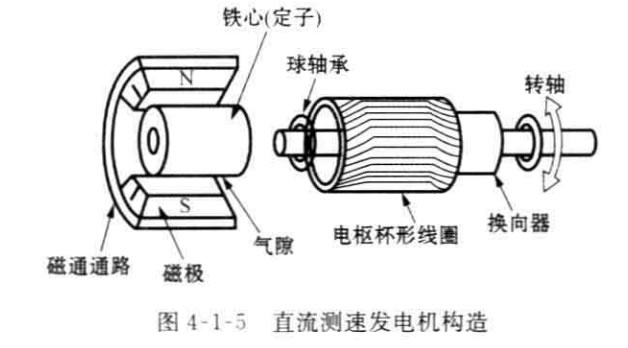
速度传感器用来检测机器人运动速度,包括身体移动速度和各关节转动速度 等。在用交直流伺服电机作为机器人驱动元件时,早期一般采用测速发电机作为 速度的检测器。它与电动机同轴,电动机转速不同时,输出的电压值也不同,其电 压值就是转动速度。测速发电机要求输出电压与转速间保持线性关系,并要求输 出电压陡度大,时间及温度稳定性好。测速发电机一般可分为直流式和交流式两种。直流式测速机的励磁方式可分为他励式和永磁式两种,电枢结构有带槽的、空心的、盘式印刷电路等形式,其中带槽式Z为常用。
如图4-1-5所示,直流测速发电机的定子是永久磁铁,转子是线圈绕组。它的 原理和永久磁铁的直流发电机相同,转子产生的电压通过换向器和电刷以直流电 压的形式输出,可以测量0~10000r/min 量J的旋转速度,线性度为0 . 1 % 。 此 外,停机时不易产生残留电压,因此,它Z适宜作速度传感器。但是电刷部分是机械接触,需要注意维修,另外,换向器在切换时产生脉动电压,使测量精度降低。因 此,现在亦有用无刷直流测速发电机。
永久磁铁式交流测速发电机的构造和直流测速发电机恰好相反,它在转子上 安装多磁极永久磁铁,定子线圈输出与旋转速度成正比的交流电压。随着计算机 微电子技术的进步,现在一般不再专门使用测速发电机来测量转速,而是通过对位 移进行微分计算来获得速度值。如利用光电码盘测量角位移时,在单位时间内的 脉冲数即为速度。
用于机器人运动关节的零位和极限位置的检测,零位是机器人关节运动开始时的位置,零位检测精度直接影响机器人运动的精确度;位移传感器一般都安装在机器人的关节上,用来检测机器人各关节的位移量
大部分轮子是由可变形材料(如橡胶)制成,所以相互作用是接触面;,假设全方位移动机器人重心不高,因此当机器人加速运动时由重心偏高产生的各轮对地压力的变化忽略不计
机器人系统的要求确定后,首先要考虑的是选择多大的电机合适,主要考 虑负载的物理特性,包括负载扭矩、惯量等。在伺服电机中,通常以扭矩或者力来 衡量电机大小
全方位移动机构从当前位置能够向任意方向运动,而不需要机器人改变姿态;在需要精确定位和高精度轨迹跟踪的时候也要求运动机构具备全方位移动的能力
特点是机构组成简单、WMR 旋转半径可从零到无限大任意设定;个明显的优点是不需要专门的悬挂系统去保持各轮与地面的可靠接触;通过独立驱动各轮可实现机器人全方位移动
根据轮式移动机器人的车轮个数来分类有两个、三个、四个或六个滚轮;按照WMR 运动的约束方程可以将其分成两类;根据轮式移动机器人平衡性能分类,有动态平衡式和静态平衡式两种
宇树科技已累计完成10轮融资,累计融资超20亿元,C 轮投后估值达120亿元,投资方涵盖众多知名机构和产业基金,机械狗出货量第一,人形机器人出货量突破千台
Jetson Nano是最小的设备,配备了128核心GPU和四核ARM Cortex-A57 CPU。Jetson Xavier系列模组具有高达32 TOPS的AI性能,适用于自主机器的视觉测距、传感器融合、 定位和地图构建等应用
机器人中央控制器,即现有的机器人大脑,保证机器人部件的基本运作能力;各传感器,执行器,线束,网关相当于脑干传递信息的线束及网关,起到各个控制器,传感器信息交互通联的作用
机器人需抵抗来自外部的电磁干扰,自身产生的电磁噪声需低于限值,避免影响周边设备;协议兼容性是确保人形机器人、不同设备、系统或平台能够在异构网络环境中稳定通信和协同工作的关键能力
机器人数据可信的核心在于建立清晰可执行的判定标准;机器人算法可信检测,应从稳定性、透明性和可验证性三大方向;从行为意图识别,执行路径合理性,用户感知一致性等角度评估机器人行为的社会可接受性
机器人环境适应性是指人形机器人在不同环境条件下保持正常运作,完成指定任务的能力;机器人平均无故障间隔时间反映了产品的运行稳定性;验证人形机器人在规定条件下的使用寿命




