
| 摩登7机器人 |
| CHUANGZE ROBOT |
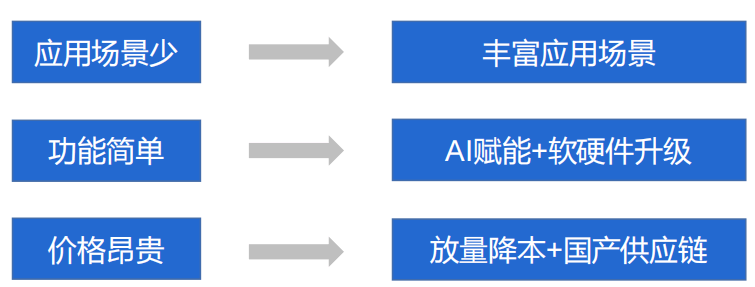
碍人形机器人商业化量产主要原因有三:
• 大规模应用场景不足,应用场景直接影响机器人需求的刚性程度,目前人形机器人应用场景仍有待挖掘。
• 诸多技术问题亟待解决。目前人形机器人尚处于功能相对简单、初步智能的形态。
• 机器人成本G企。人形机器人机构复杂,制造成本G昂,成本控制有赖于大规模生产的基础及多方位的技术
人形机器人商业化量产解决路径:
• 核心仍是机器人功能和智能化水平提升,支撑机器人从封闭场景走向开放场景,从单一场景进入复杂场景。
• 以ChatGPT、PaLM为代表的AI多模态大模型显著智能化水平,增强机器人的人机交互能力、机器人自编译能力;此外,电机、减速器、传感器, 芯片等硬件环节,持续升级迭代。
• 放量降本+引进国产供应链。特斯拉人形机器人目前仍处样机阶段,尚未量产和交付,随着商业化落地放量,以及在供应链环节引入国产供应商 后,成本有望充分下降,使得人形机器人有望得到进一步普及。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 紫外线消毒机器人 消毒机器人价格 展厅机器人 服务机器人底盘 核酸采样机器人 机器人代工厂 智能配送机器人 喷雾消毒机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 消杀机器人 导览机器人 |


