
| 摩登7机器人 |
| CHUANGZE ROBOT |
机器人分类方法有很多种。这里先介绍三种分类法,即分别按机械手的几何结构、 机器人的控制方式以及机器人控制器的信息输入方式来分。
1. 按机械手的几何结构来分
机器人机械手的机械配置形式多种多样。Z常见的结构形式是用其坐标特性来描述 的。这些坐标结构包括笛卡儿坐标结构、柱面坐标结构、J坐标结构、球面坐标结构和关 节式球面坐标结构等。这里简单介绍三种Z常见的柱面、球面和关节式球面坐标结构机 器人。
(1)柱面坐标机器人
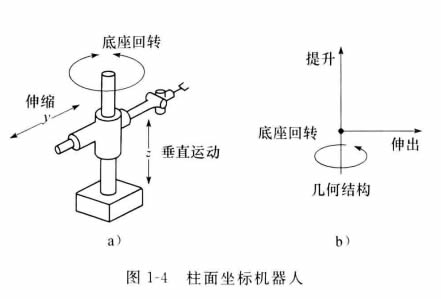
柱面坐标机器人主要由垂直柱子、 水平手臂(或机械手)和底座构成。水平 机械手装在垂直柱子上,能自由伸缩, 并可沿垂直柱子上下运动。垂直柱子安 装在底座上,并与水平机械手一起(作 为 一个部件)能在底座上移动。这样, 这种机器人的工作包迹(区间)就形成一 段圆柱面,如图1-4所示。因此,把这种机器人叫做柱面坐标机器人。
(2)球面坐标机器人
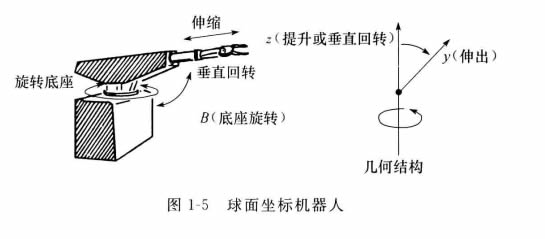
这种机器人如图1-5所示。它像坦克的炮塔一样,机械手能够做里外伸缩移动、在垂直平面上垂直回转以及在水平平面上绕底座旋转。因此,这种机器人的工作包迹形成球面 的一部分,并被称为球面坐标机器人。
(3)关节式球面坐标机器人
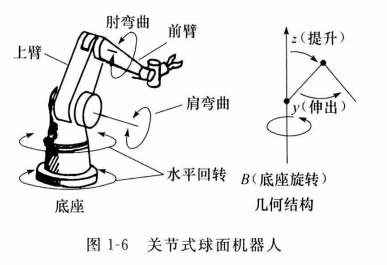
这种机器人主要由底座(或躯干)、上臂和前臂构成。上臂和前臂可在通过底座的垂直平面上运动,如图1-6所示。在前臂和上臂间,机械手有个肘关节;而在上臂和底座间, 有个肩关节。在水平平面上的旋转运动,既可 由肩关节进行,也可以绕底座旋转来实现。这 种机器人的工作包迹形成球面的大部分,称为 关节式球面机器人。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


