
| 摩登7机器人 |
| CHUANGZE ROBOT |
人的眼睛是感觉之窗,人有80%以上的信息靠眼睛获取。人眼之所以能看清楚东西 是因为眼睛中有200多万个视觉神经将光学信号送向视网膜,视网膜又将光学信号转变 成神经脉冲传向大脑,从而让人能够看见物体的颜色和形状等。能否造出“人工眼睛”让 服务机器人也能像人那样看清楚东西,这是服务机器人的重要课题。有关服务机器人 “眼睛”的识别理论和方法及技术统称为模式识别,所谓模式是指被识别的事物,它可以 是文字、图像、声音等物理实体,也可以是气候或环境等抽象虚体。服务机器人的“眼睛” (各种机器视觉系统)工作过程与人眼类似,也是由信息获取、图像处理、特征抽取、判决 分类等构成。
人脸识别机器人的“眼睛”的作用主要体现在以下几个方面。
(1)服务机器人“眼睛”认字。例如,大家都知道信件投入邮筒后,需要经过邮局工人 分拣才能发往世界各地。 一般地说, 一个工人一天只能分拣2000~3000封信,现在采用 一种机器人“眼睛”(邮政编码识别系统)分拣则可以提高效率十多倍。机器人“眼睛”认 字的原理与人类认字的过程大体相似,它先对输入的邮政编码进行分析和抽取特征。其 次是进行对比,即把抽取的特征与原先规定的0~9这10个符号的特征进行比较,与哪 个数字的特征Z相似就是哪个数字。在模式识别理论中,这种方法叫做统计识别法。服 务机器人“眼睛”认字除了用于邮政系统外,还可用于手写文字输入、证件、票据、车牌的 识别等许多方面。
(2)服务机器人“眼睛”识图。例如,工人用数控机床加工零件要求先看懂图纸才行。 能否让服务机器人“眼睛”来识别图纸呢?这就是服务机器人“眼睛”的识图问题。服务 机器人“眼睛”识图的方法除了统计方法外还有语言法,它是基于人类认识过程中视觉和语言的联系而建立的,即从图像结构入手,把图像分解成一些直线、斜线、折线、点、弧等 基本元素,研究它们是按照什么样的规则构成图像的,检查待识别图像是属于哪一类“句 型”,是否符合预先规定的句法。按照这个原则,若句法正确就能识别出来。服务机器人 “眼睛”识图有广泛的应用,在工业、农业、国防、科研、实验、医疗、教育、娱乐等各个领域 中,涉及大量的识图问题,都可以用服务机器人“眼睛”来识别。
(3)服务机器人“眼睛”认物。例如,服务机器人“眼睛”识别物体(3D 识别系统)一般 以摄像机作为信息输入系统,根据人类识别景物主要靠明暗信息、颜色信息、距离信息等 原理,服务机器人“眼睛”识别物体也是输入这三种信息。由于摄像机所拍摄的方向不 同,可以得到各种图形和图像,如抽取出立方形物体的D点数和平行线组数等立方体的 共同特征,参照事先存储在计算机中的物体特征表,便可以识别立方体了。目前,服务机 器人“眼睛”不仅可以识别出简单形状的物体,对于曲面物体或电子元件等复杂形状的物 体和室外景物识别也有了很大的进展。服务机器人“眼睛”识别物体可以用于各类产品外观检查,零件分选和整机装配等许多方面。下面介绍一个服务机器人“眼睛”的实例。
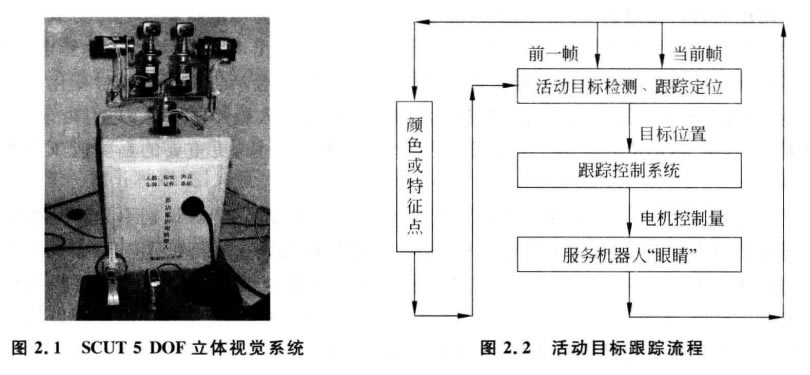
图2.1所示的服务机器人“眼睛”是一个5 DOF 立体视觉系统,它能够跟踪和识别活 动的目标。它是由 SCUT “智能计算机”科研团队研制成功的。该“眼睛”包括两个彩色 摄像机、图像处理板、个人电脑、数据采集卡、5个直流电机、直流电机驱动器。考虑到主 动跟踪和目标特征与速度和鲁棒性等要求,该“眼睛”以基于颜色的跟踪算法为基础,结 合目标特征跟踪及目标运动预测等就可以对活动目标进行跟踪和识别。
SCUT 5 DOF 立体视觉系统跟踪活动目标的流程如图2.2所示。在目标识别中,由 于目标特征跟踪需要计算光流场,同时还要对多个特征进行匹配等,计算量比基于颜色 的跟踪算法更大,并且目标检测采用了颜色模型等,所以在对目标进行跟踪时,机器人 “眼睛”以颜色跟踪为主,在判断颜色跟踪失败时,再启用目标特征跟踪及目标运动预测, 直到颜色跟踪恢复正常为止。
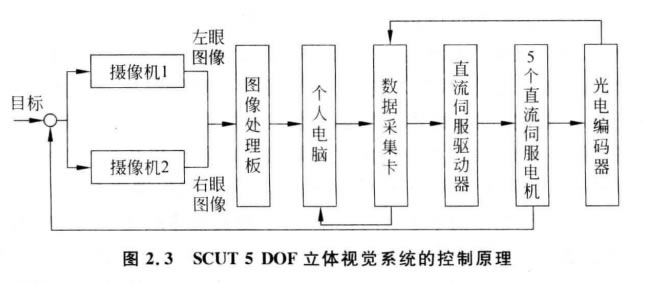
SCUT 5 DOF 立体视觉系统的控制原理如图2.3所示,两个彩色摄像机拍摄待识别 目标图像,经过图像处理板后送入个人电脑进行分析,经过颜色或特征跟踪算法处理后, 形成5个直流电机的转角控制指令,并经由数据采集卡和直流电机驱动器放大后驱动5个直流电机转动,从而带动两个摄像机分别或共同作上、下、左、右、旋转运动,跟踪待识 别目标。无论待识别的目标怎样活动,只要不离开两个摄像机的视觉范围,这个跟踪和 识别过程就一直持续地进行下去。由图2 .3可以看到,5个直流电机的输出(它们的转 动,即两个摄像机的运动)是直接连接到或者说跟踪目标的。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


