腿式运动以一系列机器人和地面之间的点接触为特征。其主要优点包括在粗糙地形上(图2.5)的自适应性和机动性。因为只需要一组点接触,所以只要机器人能够 保持适当的地面整洁度,这些点之间的地面质量是无关紧要的。另外,只要行走机器 人的步距大于洞穴的宽度,它就能跨越洞穴或者裂口。腿式运动的Z后一个优点是, 能用高度的技巧来操纵环境中的物体。举一个精彩的昆虫例子,即甲壳虫,它用灵巧 的前肢在运动的同时能够滚动一个球。
腿式运动的Z主要的缺点包括动力和机械的复杂性。腿,可能包括几个自由度, 需要能够支撑机器人部分总重量,而且在许多机器人中,腿需要能够抬高和放低机器人。另外,如果腿有足够数目的自由度,在许多不同的方向给予力,机器人就能实现高度的机动性 。
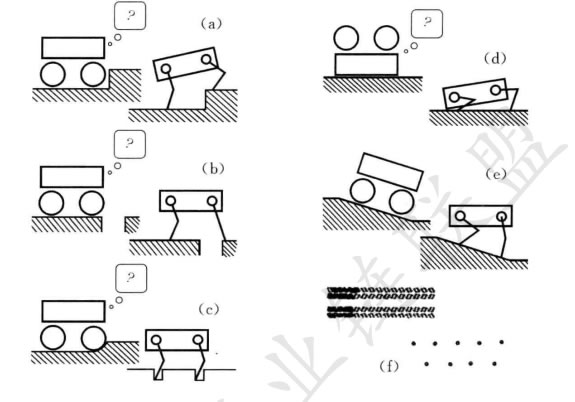
腿式移动机器人特别适合于粗糙地形,在这种地形上,它们能够横越轮式系统 不能通过的障碍,如(a) 台阶,(b) 裂隙,或(c) 沙斑。另外,当机器人跌倒时,高 数目的自由度容许机器人站起来(d) 并保持负重平衡(e)。由于腿式系统不需 要支撑的连续路经,它们可以依靠少数几个所选的立脚点,从而减少对环境的 影响(f) 。
具有全方位轮的机器人有3个自由度运动的能力,即沿着 平面上x 轴,y 轴以及绕自身中心旋转的运动能力,这充分增加了机器人的机动性,全方位移动机器人可以由不同数量的全方位轮组成
双轮差速驱动的移动机器人的运动学模型, 即讨论给定机器人的几何特征和它的轮子速度后,机器人的运动方程,机器人有2个主动轮子,各具直径r, 两轮轮间距为l
无中间减少传动环节或啮合环节,定位准确;无相对摩擦,减少不必要的磨损和功率损失;机器人速度快,力量大,对抗性强;无相对摩擦,延长了轮轴寿命;保护了电机,抗冲击性好
依据通过3轴(X,Y,Z) 各自的加速度检测和检测各轴相对基准的转角偏差的惯性导航系统来求解;用速度陀螺仪等求得每单位时间的移动距离和单位时间的方位变化,计算出每个时刻的位置和方位
机器人的大脑的作用主要是针对当前语义、文字的理解识别出任务目标, 并结合输入的图像信息,在环境中识别出操作对象;做出合理的指令任务推导,并生成小脑的执行指令
如何实时、精准跟踪末端执行器与被操作物体之间的空间距离和位置信息;如何正确选择跟交互物体的操作位姿;机器人在实际操作中获取最优抓取姿态和位置的能力
手眼协同能通过视觉做好对灵巧手位置的判断、动作的规划及与物体交互策略判定,并能够根据手的传感器信息,判断力的大小方向是否合适,从而大幅提升定向抓取操作的成功率
双手灵巧配合可完成具有生物运动特征的围巾佩戴任务;灵巧手精准执行酒杯和酒瓶的抓握,双臂+双手协同完成倒酒操作;对日常保洁工作的覆盖,包括在室内场景巡航,针对卫生间、餐桌等场景的保洁操作
大规模应用场景不足,应用场景直接影响机器人需求的刚性程度;人形机器人机构复杂,制造成本高昂,成本控制有赖于大规模生产的基础及多方位的技术
具身智能包含具身感知、具身想象和具身执行三个模块,各学科相对成熟的积累为具身智能进一步发展提供基础,通过多模型训练,在多传感器合作下完成任务执行
学习方法:旁观型学习,实践性学习;擅长领域:智能中表征与计算的部分,主动式感知,执行物理任务;感知方法:被动接受数据,支持与外界交互




