
| 摩登7机器人 |
| CHUANGZE ROBOT |
腿式机器人腿的数目Z少当然是1。有几个理由说明,使腿的数目尽量少是有益 的。身体的质量对行走机器是极其重要的,而1条腿使累加的腿的质量Z小。当机 器人有多条腿时,就要求腿之间须协调,1条腿就不需要这种协调了。也许Z重要的 是,单腿机器人使腿式运动的基本优点Z大化:在全跟踪的场合,如轮子一样,腿与地 面只有一个接触点。单腿机器人只需要一系列的单点接触,就能经受Z粗糙的地形。 而且,取一个跑步的起点,跳跃机器人可动态地跨过比它的步幅大的沟隙。而多腿不 能跑的行走机器人,只限于跨过与它的跨距一样大小的沟隙。
制造单腿机器人的主要困难是保持平衡。1条腿的机器人不仅不可能静态行走,而且当平稳不可能时,静态稳定也不可能。机器人需要主动地自我平衡,或者改变它的重心,或者给出校正力。因此,成功的单腿机器人需要能动态地稳定。
图2.13表示的是Raibert 跳跃机42,2647,它是已制作的Z有名的单腿跳跃机器人 之一。这个机器人通过调节相对于身体的腿角,不断地修正身体姿态和机器人速度。 激励是液压的,包括在立姿向空中跳跃期间腿的高性能纵向伸展。激励虽然是强有 力的,但这些激励器需要一个随时连接到机器人的大型的、外装的液压泵。
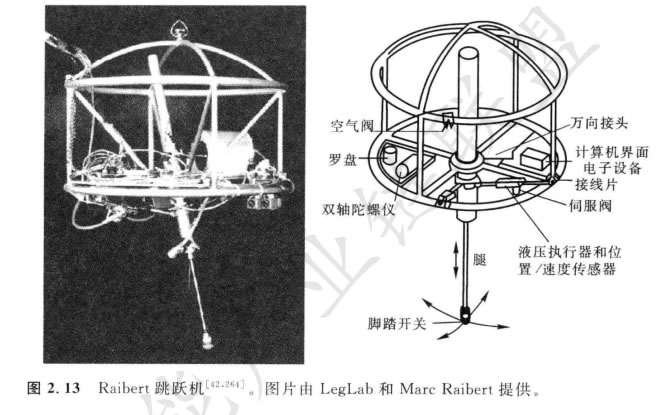
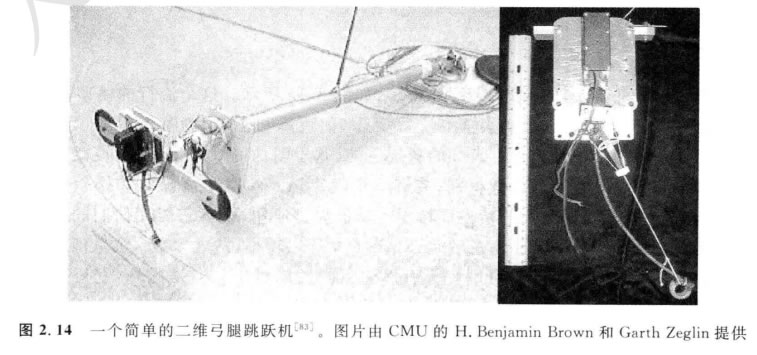
图2.14表示的是Z近研制开发的更高效能的结构[83,它利用了设计良好的机械 动力学83。它不用外装的液压泵供给能量,而是设计了弓腿跳跃机,当它着地时,利 用一根有效的弓形弹簧腿来获得机器人的动能。这个弹簧返回了几乎85%的能量, 这就意味着每次只需要添加所需能量的15%即可稳定跳跃。这个机器人用支架沿轴 受到约束,用装在机器人上的一组电池,已经展示能连续跳跃20 min 。和 Raibert 跳 跃机一样,弓腿跳跃机通过在髋关节改变相对于身体的腿角来控制速度。
Ringrose 的论文揭示了应用于单腿跳跃机的有关机械学和控制的非常重要 的对偶性。通常,精巧的机械设计与复杂的控制电路一样,可以执行相同的操作。在 该机器人中,其脚的物理形状正好是合适的曲线,因此当机器人非完全垂直着地时, 由碰撞产生合适的校正力,使机器人在下次落地时垂直。该机器人是动态稳定的,而 且是无源的。机器人与其环境之间的物理交互提供了校正,不用计算机或环路中的 任何有源控制。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


