
| 摩登7机器人 |
| CHUANGZE ROBOT |
移动机器人轮子类型的选择与轮子装配或轮子几何特征的选择紧密相关。移动机器人的设计者在设计轮式机器人的运动机构时,需要同时考虑这两个问题。为何轮子的类型和轮子的几何特征如此重要?因为机器人的三个基本特征受这些选择所支配:机动性、可控性和稳定性。
汽车大都为高度标准化的环境(道路网)而设计,与其不同的是,移动机器人则是 为应用在种类繁多的环境而设计。汽车全部共享相同的轮子结构,因为在设计空间 中存在一个区域,使得它们对标准化环境(铺好的公路)的机动性、可控性和稳定性Z大。可是,不同的移动机器人面临各种不同环境,没有单d一个轮子结构可以使这些 品质Z大化。所以,你会看到移动机器人的轮子结构种类繁多。实际上,除了为道路 系统设计的移动机器人外,很少机器人使用汽车的Ackerman 轮子结构,因为它的机 动性较差。
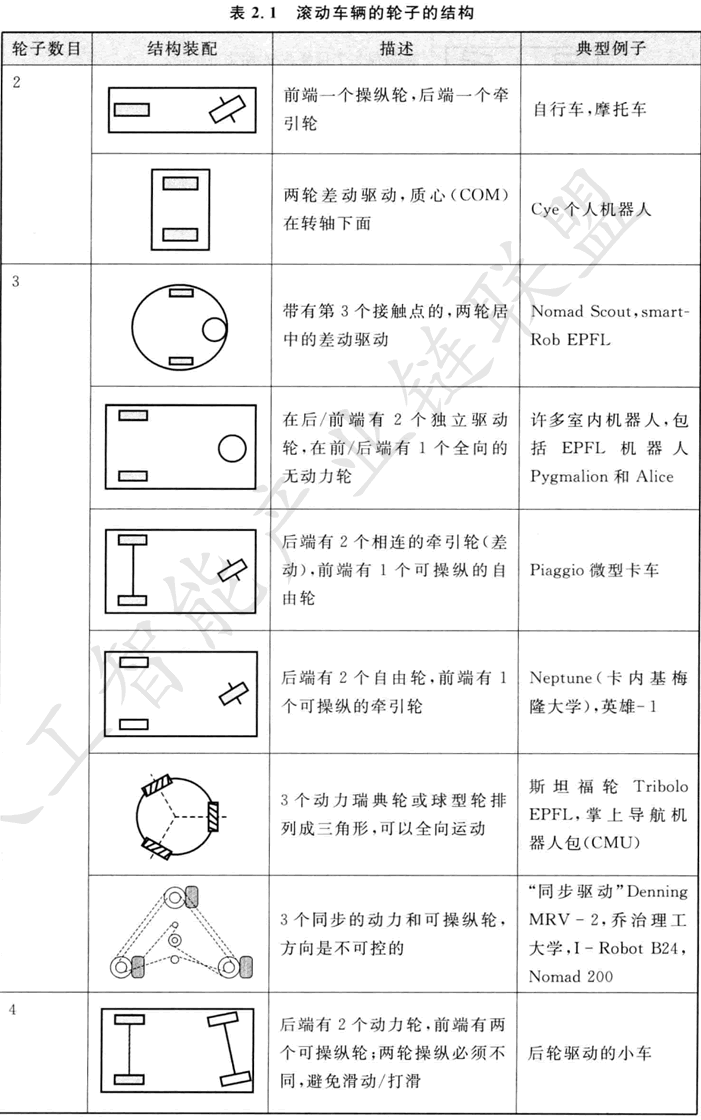
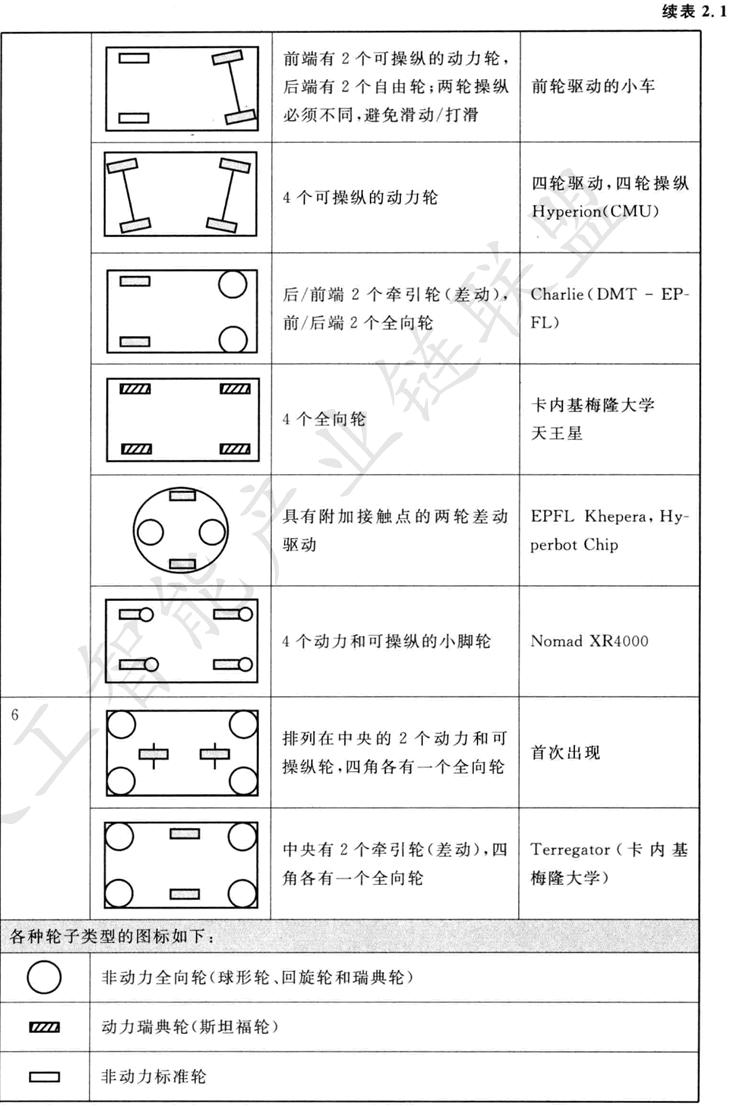
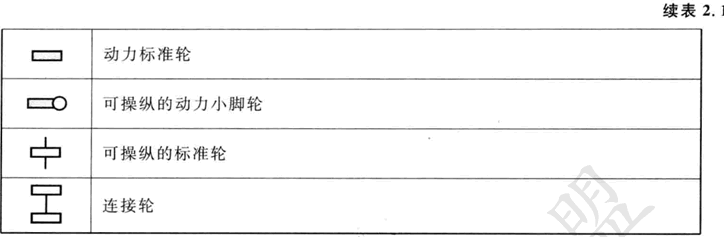
表2.1给出了轮子结构的概貌,按轮子数目排序。表中描述了特殊轮子类型的选择和机器人底盘上它们的几何结构这两个方面。摩登7注意到,所示的某些轮子结构在移动机器人的应用中很少用到。例如,两轮自行车装配,其机动性中等,可控性 差。再像单腿跳跃机,它根本不能静止地站着。不过,表中提供了在运动机器人设计 中可能用到的许多种类轮子结构的说明。
表2.1中种类的数目是很多的。不过,这里列出了重要的趋向和分组,它可帮助 理解各结构的优点和缺点。下面,根据以前确认的三个问题:稳定性、机动性和可控性,摩登7来确认一下某些关键性的折衷。
令人惊奇的是,静态稳定所要求的Z小轮子数目是2个。如上所述,如果质心在轮轴下面, 一个两轮差动驱动的机器人可以实现静态稳定。 Cye 就是使用这种轮子 结构的商业移动机器人(图2.27)。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


