上下文管理是对话式 AI 的记忆中枢,需通过技术方案(RAG、结构化记忆)与优化策略
(意图过滤、动态裁剪)解决连贯性、资源消耗与准确性的三角平衡问题。
声网对话式 AI 引擎采用的方案是通过结构化短期记忆+动态长期记忆注入,在保障兼容性的同时,针对实时语音交互场景(尤其中断处理)进行深度优化,并赋予开发者高度灵
活的上下文控制权限。
1.短期记忆机制
短期记忆(Short-term Memory)是智能体在当前会话中临时保存和处理的信息空间。
用户和对话式智能体互动期间,智能体会在短期记忆中缓存当前对话的上下文,确保智能体
能够连贯地理解和回应用户的连续输入。
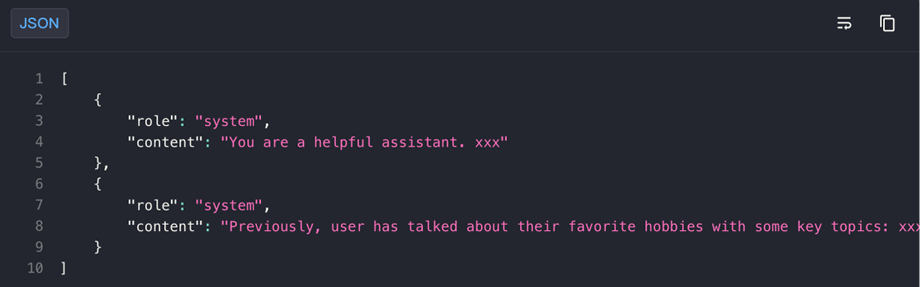
对话式 AI 引擎整体短期记忆会以 JSON 的形式存储,遵循 OpenAI Chat
Completions 的规则,同时进行了部分的扩展。
2.短期记忆的获取:
◇ 智能体运行期间,调用 GET 获取智能体短期记忆接口获取短期记忆 JSON。该接
口会得到智能体生命周期内储存的完整的短期记忆。
◇ 智能体停止后,声网会通过消息通知服务将短期记忆回调至你的业务服务器,详见
消息通知事件类型。
3.固化和注入长期记忆:
智能体的短期记忆会随智能体停止而消失,你可以在智能体停止后,将短期记忆储存到
你的服务器以固化为长期记忆,之后在创建智能体时通过 llm.system_messages 直接注入
原始记忆内容或经过总结的记忆内容,从而实现在智能体退出或重启后仍然能够访问和使用
这些数据。
以下示例展示了通过 system_messages 注入经过总结的记忆内容:
拉格朗日函数L被定义为系统的动能K 和势能P 之差,即 L=K 一P 式中 K—— 机器人手臂的总动能,P—— 机器人手臂的总势能,机器人系统的拉格朗日方程为
自由度是机器人的一个重要技术指标,它是由机器人的结构决定的,并直接影响到机器人的机动性;机器人机械手的手臂具有三个自由度,其他的自由度数为末端执行装置所具有
机械手是具有传动执行装置的机械,它由臂、关节和末端执行装置(工具等)构成,组合为一个互相连接和互相依赖的运动机构;机器人接收来自传感器的信号产生出控制信号去驱动机器人的各个关节
前台接待机器人的控制系统由“任务规划” “动作规划”“轨迹规划”和基于模型的 “伺服控制”等多个层次组成,机器人针对各个任务进行动作分解,实现机器人的一系列动作
伺服电机的转动速度、扭矩、反馈信号频率和额定电压等参数是整个机器人控制系统的决定性因素之一;减速机和减速齿轮降低电机的转动速度,加大输出扭矩
每个关节都是影响智能接待智能接待机器人整体运动状态的因子,所以设计时必须考虑全体的运动特性,并对关节的运动范围和运动速度变化做出约束。
为规划智能接待仿人机器人的机构设计需求,计算机器人运动过程中各关节所受的力和力矩、分析动力学稳定性和控制规律,必须建立其动力学模型
串行控制结构是指机器人的控制算法是由串行计算机来处理;并行处理结构能满足机器人控制的实时性要求,实现复杂的计算力矩法、非线性前馈法、自适应控制法
运动控制系统由通信模块、电源模块、控制模块和电机驱动模块组成;分别驱动3个全方位轮,实现3轴联动;通过闭环采集到的电机码盘信息获得的3个轮子的速度反馈回PC 机
硬件框图包括一个以TMS320F2812DSP 为核心的DSP 控制板,一块配套的功率驱动板和一台无刷直流电机;功率驱动部分的硬件电路,主要由前置驱动芯片和六个功率MOSEFET 管组成
用来检测机器人的加速度,括身体的加速度和各关节角加速度,有时候也作为抑制各关节机械振动而检测;根据原理可分为应变式、压电式和MEMS 技术等
检测机器人运动速度,包括身体移动速度和各关节转动速度等;一般可分为直流式和交流式两种,直流式测速机的励磁方式可分为他励式和永磁式两种,有带槽的、空心的、盘式印刷电路等形式




