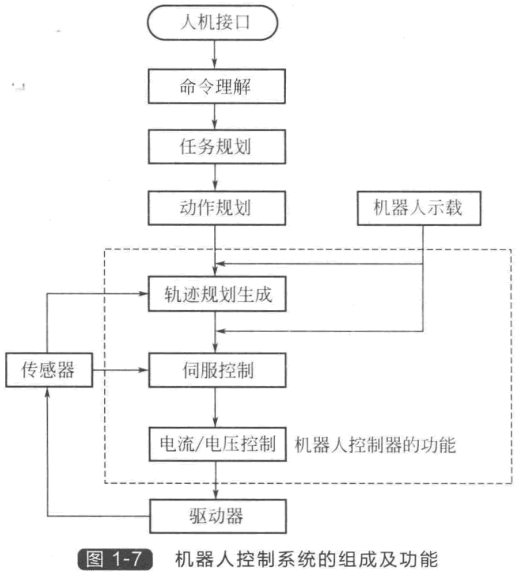
对于一个具有高度智能的机器人,它的控制系统实际上包含了“任务规划” “动作规划”“轨迹规划”和基于模型的 “伺服控制”等多个层次,如图1-7所示。 机器人先要通过人机接口获取操作者的 指令,指令的形式可以是人的自然语言, 或者是由人发出的专用的指令语言,也可 以是通过示教工具输入的示教指令,或者 键盘输入的机器人指令语言以及计算机程
序指令。机器人其次要对控制命令进行解释理解,把操作者的命令分解为机器人可以实现的 “任务”,这是任务规划。然后机器人针对各个任务进行动作分解,这是动作规划。为了实现机器人的一系列动作,应该对机器人每个关节的运动进行设计,即机器人的轨迹规划。Z底 层是关节运动的伺服控制
控制系统的任务是根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。如果 机器人不具备信息反馈特征,则为开环控 制系统;具备信息反馈特征,则为闭环控 制系统。根据控制原理可分为程序控制系 统、适应性控制系统和人工智能控制系 统。根据控制运动的形式可分为点位控制 和连续轨迹控制。
伺服电机的转动速度、扭矩、反馈信号频率和额定电压等参数是整个机器人控制系统的决定性因素之一;减速机和减速齿轮降低电机的转动速度,加大输出扭矩
每个关节都是影响智能接待智能接待机器人整体运动状态的因子,所以设计时必须考虑全体的运动特性,并对关节的运动范围和运动速度变化做出约束。
为规划智能接待仿人机器人的机构设计需求,计算机器人运动过程中各关节所受的力和力矩、分析动力学稳定性和控制规律,必须建立其动力学模型
串行控制结构是指机器人的控制算法是由串行计算机来处理;并行处理结构能满足机器人控制的实时性要求,实现复杂的计算力矩法、非线性前馈法、自适应控制法
运动控制系统由通信模块、电源模块、控制模块和电机驱动模块组成;分别驱动3个全方位轮,实现3轴联动;通过闭环采集到的电机码盘信息获得的3个轮子的速度反馈回PC 机
硬件框图包括一个以TMS320F2812DSP 为核心的DSP 控制板,一块配套的功率驱动板和一台无刷直流电机;功率驱动部分的硬件电路,主要由前置驱动芯片和六个功率MOSEFET 管组成
用来检测机器人的加速度,括身体的加速度和各关节角加速度,有时候也作为抑制各关节机械振动而检测;根据原理可分为应变式、压电式和MEMS 技术等
检测机器人运动速度,包括身体移动速度和各关节转动速度等;一般可分为直流式和交流式两种,直流式测速机的励磁方式可分为他励式和永磁式两种,有带槽的、空心的、盘式印刷电路等形式
用于机器人运动关节的零位和极限位置的检测,零位是机器人关节运动开始时的位置,零位检测精度直接影响机器人运动的精确度;位移传感器一般都安装在机器人的关节上,用来检测机器人各关节的位移量
大部分轮子是由可变形材料(如橡胶)制成,所以相互作用是接触面;,假设全方位移动机器人重心不高,因此当机器人加速运动时由重心偏高产生的各轮对地压力的变化忽略不计
机器人系统的要求确定后,首先要考虑的是选择多大的电机合适,主要考 虑负载的物理特性,包括负载扭矩、惯量等。在伺服电机中,通常以扭矩或者力来 衡量电机大小
全方位移动机构从当前位置能够向任意方向运动,而不需要机器人改变姿态;在需要精确定位和高精度轨迹跟踪的时候也要求运动机构具备全方位移动的能力




