
| 摩登7机器人 |
| CHUANGZE ROBOT |
机器人学界对机械手的运动学和动力学已经了解得相当多面了。然而,机械手主 要考虑的是关节运动学和动力学的控制问题,而移动机器人主要考虑的是质点运动学和动力 学控制问题。从机械和数学本质上来说,它们是不同的。
移动机器人系统模型目前可分为运动学模型和动力学模型两大类,两种情况下机器人运 动控制有不同的控制变量。一种为基于运动学模型的速度控制,另一种是基于动力学模型的 力矩控制。本节将讨论两轮d立驱动方式的移动机器人的运动学模型。
以四轮机器人为例,其中后面两轮是d立驱动轮,前面两轮是万向轮,机器人的运动参数和坐标系

X 、Y 为世界坐标系;
O: 为移动机器人的几何中心;
C: 是两驱动轮的轮轴中心;
R: 车轮半径;
2L: 两个驱动轮轮心间的距离;
v: 机器人的前进速度;
w: 机器人车体的转动角速度;
VL,VR: 机器人左右轮的线速度;
θ:机器人的姿势角;
假设机器人在水平面运动并且车轮不会发生形变。机器人两个固定的驱动轮由单d的驱 动器分别驱动控制,假定车轮与地面接触点速度在垂直于车轮平面内的分量为零,驱动轮与 地面“只能转动而不能滑动”,满足无滑动条件。在无滑动纯滚动的条件下,轮子在垂直于 轮平面的速度分量为零,系统约束条件如下:
x sinθ—ycosθ=0
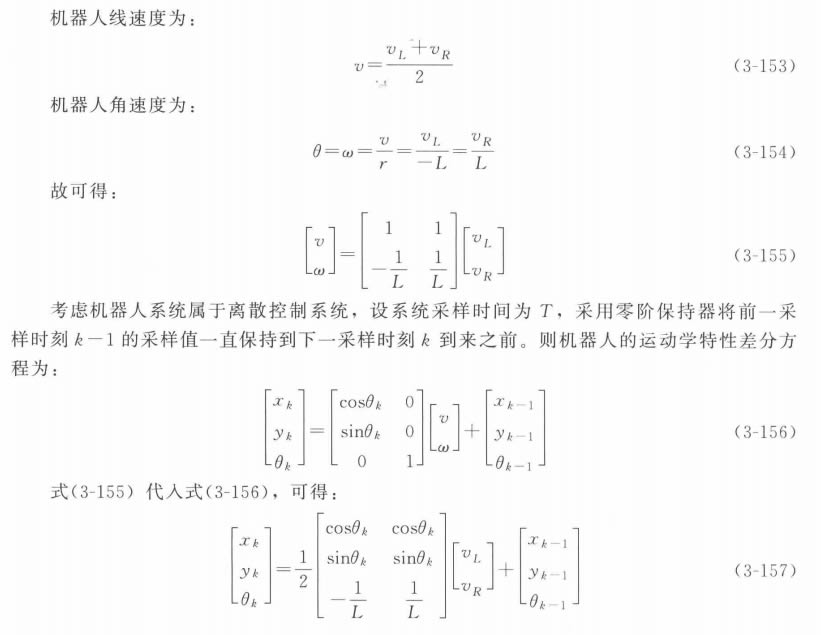
移动机器人能够直接进行控制的是两个d立驱动电机,因此采用 [vL,vR] 形式的输 入控制量,来分别控制两个驱动轮。下面讨论如何将机器人的前进速度v 和转动速度w 转 化为机器人两个轮子的线速度v₁ 和vR。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


