
| 摩登7机器人 |
| CHUANGZE ROBOT |
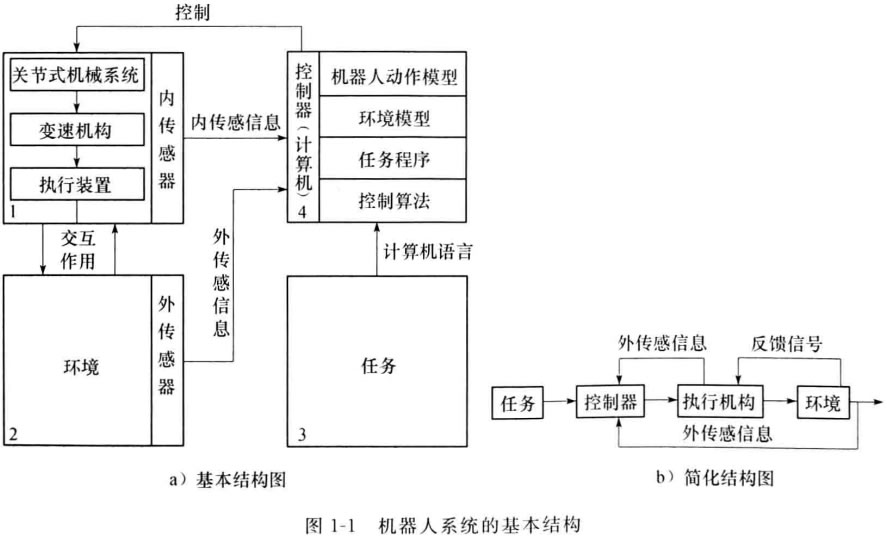
一 般情况下, 一 个机器人系统由下列四个互相作用的部分组成:机械手、环境、任务 和控制器,如图1 - 1a 所示,图1 - 16为其简化形式。
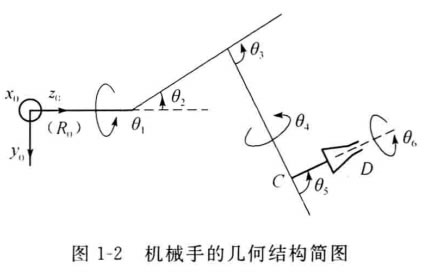
机械手是具有传动执行装置的机械,它由臂、关节和末端执行装置(工具等)构成,组合为一个互相连接和互相依赖的运动机构。机 械手用于执行指定的作业任务。不同的机械手 具有不同的结构类型。图1-2给出机械手的几何 结构简图。机械手又称为操作机、机械臂或操 作手。大多数机械手是具有几个自由度的关节 式机械结构, 一般具有六个自由度。其中,头 三个自由度引导夹手装置至所需位置,而后三 个自由度用来决定末端执行装置的方向。
环境指机器人所处的周围环境,它不仅由几何条件(可达空间)所决定,而且由环境和 它所包含的每个事物的全部自然特性所决定。机器人的固有特性由这些自然特性及其环境 间的互相作用所决定。在环境中,机器人会遇到一些障碍物和其他物体,它需要避免与这 些障碍物发生碰撞,并对这些物体发生作用。环境信息一般是确定的和已知的,但在许多 情况下,环境具有未知的和不确定的性质。
摩登7把任务定义为环境的两种状态(初始状态和目标状态)间的差别。需要用适当的程序设计语言来描述这些任务,并把它们存人机器人系统的控制计算机中去。
计算机是机器人的控制器或脑子。机器人接收来自传感器的信号,对之进行数据处理,并 按照预存信息、机器人的状态及其环境情况等,产生出控制信号去驱动机器人的各个关节。
对于技术比较简单的机器人,计算机只含有固定程序;对于技术比较先进的机器人, 可采用程序完全可编的小型计算机、微型计算机或微处理机作为其电脑。具体说来,在计 算机内存储有下列信息:
1)机器人动作模型 表示执行装置在激发信号与机器人运动之间的关系。
2)环境模型 描述机器人在可达空间内的每一个事物。
3)任务程序 使计算机能够理解其所要执行的作业任务。
4)控制算法 计算机指令的序列,它提供对机器人的控制。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 展厅机器人 服务机器人底盘 具身智能教育机器人 智能配送机器人 导览机器人 |


