
| 摩登7机器人 |
| CHUANGZE ROBOT |
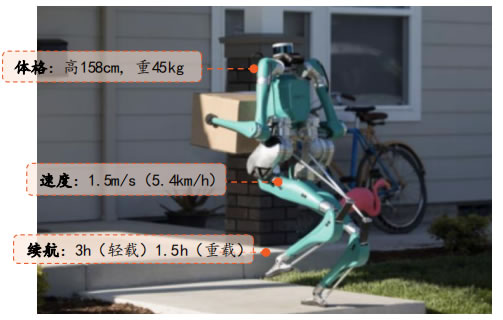
Agility Robotics是一家致力于双足机器人研发的初创公司。Agility Robotics 2015年成立于美国,部分创始团队和技术成果 脱胎于俄勒冈州立大学的动态机器人实验室。Agility Robotics致力于研发和制造双足机器人,并将其在商业环境中应用。 2017年,Agility Robotics推出了双足机器人Cassie,它没有上半身,只有胯部和两条类似鸵鸟的腿。2019年,Agility推出了 人形机器人Digit,在Cassie的基础上加上了躯干、手臂,并增加了更多计算能力。
Digit从功能出发进行设计,有望在物流L域实现应用。不同于波士顿动力Atlas对运动能力的冗余设计,Agility致力于将机 器人投入实际应用。Digit主要为物流场景设计,可以拿起和堆叠18kg重的箱子,进行移动包裹、卸货等工作, “后一 公里”配送功能也正在开发当中。Agility公司创始人认为,与小车相比,双足机器人在物流L域会展现出更大的灵活性。
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 紫外线消毒机器人 消毒机器人价格 展厅机器人 服务机器人底盘 核酸采样机器人 机器人代工厂 智能配送机器人 喷雾消毒机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 消杀机器人 导览机器人 |


