
| 摩登7机器人 |
| CHUANGZE ROBOT |
驱动系统是用来使机器人发出动作的动力机构。机器人驱动系统可将电能、液压能和气压能转化为机器人的动力,使机 器人的关节转动或移动。根据能量转换方式的不同,机器人的驱动方式可分为电机驱动、液压驱动、气动驱动等。
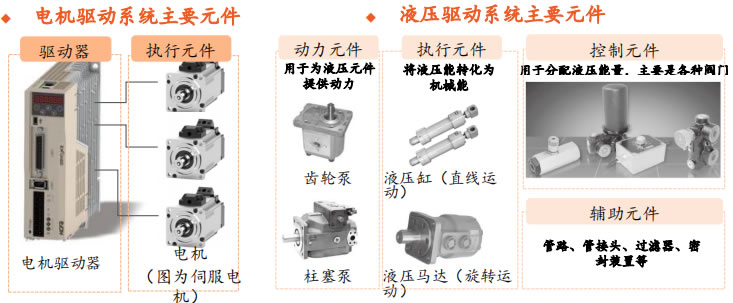
电机驱动:使用普遍、成熟的驱动方式,利用通电线圈在磁场中受力转动的现象制成,将电能转化为机械能。由于 产生的运动为G速旋转运动,通常需要搭配减速器来降低转速、提G转矩。现有的J大多数人形机器人采用电机驱动。
液压驱动:采用液体作为介质,通过液体压力实现驱动的方式。具有小型轻质、响应速度快、传动平稳等优势,但维护 难度较大。液驱系统在大型、重载、特种机器人中存在一定的应用。波士顿动力的机器人Atlas采用液压驱动方案。
气动驱动:与液驱的结构和原理类似,但将空气作为压力传导介质,各组成元件可参考液驱系统。气动系统较液压更小 更轻,但控制精度不G,响应速度不够快。气动人工肌肉是气动驱动的一种典型产品,存在一定应用前景。
|
查看更多相似文章
|
 |
| 机器人底盘 Disinfection Robot 消毒机器人 讲解机器人 迎宾机器人 移动机器人底盘 商用机器人 智能垃圾站 智能服务机器人 大屏机器人 雾化消毒机器人 紫外线消毒机器人 消毒机器人价格 展厅机器人 服务机器人底盘 核酸采样机器人 机器人代工厂 智能配送机器人 喷雾消毒机器人 图书馆机器人 导引机器人 移动消毒机器人 导诊机器人 迎宾接待机器人 前台机器人 消杀机器人 导览机器人 |


